
模拟预定航线与动态威胁规避路径规划,是作战分析人员面临的一个重大问题。若没有通过自动化生成作战有效航线的方法,分析人员通常不得不为整个任务集中的多架飞机逐一硬编码设定航线。本研究基于迪杰斯特拉算法,开发、实现并分析了适用于在反介入/区域拒止(A2AD)环境中作战飞机的威胁规避路径规划算法,该算法能够在获知新威胁信息时动态更新任务航线。进行了一项实验设计,以确定网格参数对作战效能指标和计算成本的影响。统计分析结果表明,在将网格间距设置为最小地空导弹威胁半径的50%时,所提算法能在不产生过高计算成本的前提下,实现最佳的作战性能。
飞机任务的航线规划相当耗时,通常需要在任务执行前几天完成。任务开始时很少能掌握所有必需信息以降低威胁风险。此外,在初始任务规划之后,威胁的位置和数量可能会发生变化,因为新的威胁会在任务期间通过机载情报、监视与侦察(ISR)或机载传感器被发现。在飞行中计算新航线,对已经任务饱和的机组人员而言是一项艰巨的挑战。
2018年美国《国防战略》中提到了以相关速度、创新以及精简从开发到部署的快速迭代方法实现交付效能(马蒂斯,2018年)。创新推动着增强战术优势的研发,这也有助于这些系统本身的开发和部署(特里维西克,2019年)。因此,现代军用飞机利用传感器融合来修改飞行中的航线,以降低来自敌方系统的威胁。这些系统的先进性使得机组人员能够最大限度地减少暴露在敌方传感器下的时间,并在新威胁显现时动态地改变航线。
模拟预定航线(总体上)以及威胁规避路径(具体而言)是作战分析人员面临的一个重大难题。若没有通过自动化生成作战有效航线的方法,分析人员通常不得不为整个任务集中的多架飞机逐一硬编码设定航线。因此,开发一种能够计算穿越对抗区域最低风险路径,并能根据新威胁信息动态更新航线的路径规划算法,是生成相关仿真结果的关键工具。
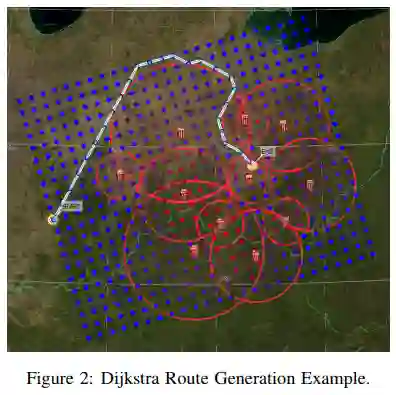
本研究探讨了在"高级仿真、集成与建模框架"(AFSIM)中,为作战仿真实现一种基于迪杰斯特拉最短路径算法的路径规划算法。该算法首先计算一条最小化飞机受威胁暴露的航线,并在任务执行期间根据新的威胁信息动态更新该航线。
本文其余部分结构如下。第2节是对A2AD、作战建模、迪杰斯特拉算法、军事威胁路径规划和实验设计的文献综述。第3节是研究的方法论及其AFSIM模型实现的框架,包括内部路径规划算法、模拟A2AD场景、迪杰斯特拉路由工具、实验设计(DOE)和效能度量(MOE)。第4节包括仿真运行的结果与分析。第5节包含本研究得出的结论与建议以及对未来研究的展望。
