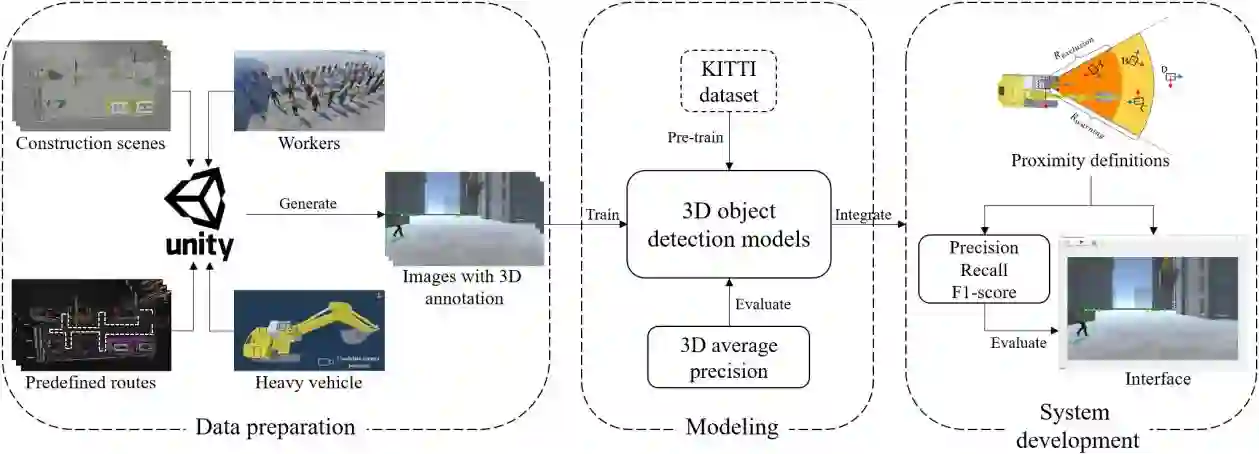
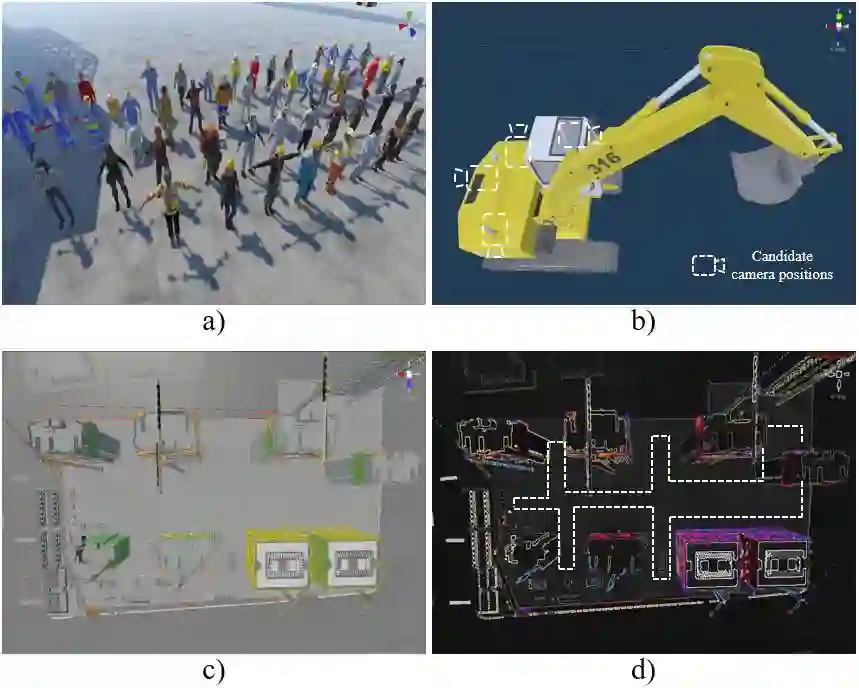
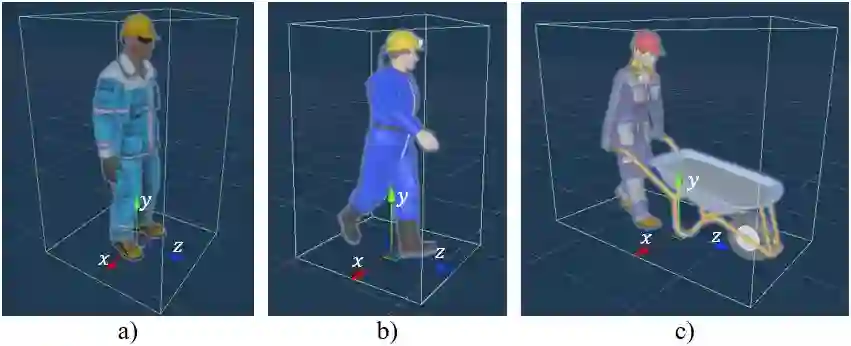
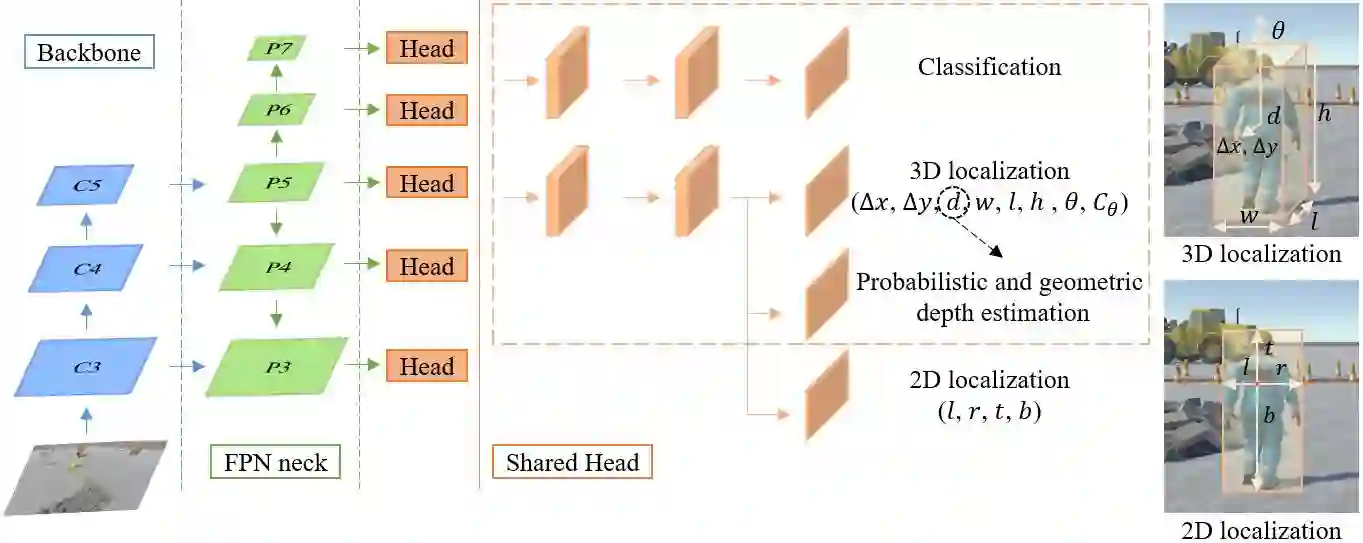
Accident of struck-by machines is one of the leading causes of casualties on construction sites. Monitoring workers' proximities to avoid human-machine collisions has aroused great concern in construction safety management. Existing methods are either too laborious and costly to apply extensively, or lacking spatial perception for accurate monitoring. Therefore, this study proposes a novel framework for proximity monitoring using only an ordinary 2D camera to realize real-time human-machine collision warning, which is designed to integrate a monocular 3D object detection model to perceive spatial information from 2D images and a post-processing classification module to identify the proximity as four predefined categories: Dangerous, Potentially Dangerous, Concerned, and Safe. A virtual dataset containing 22000 images with 3D annotations is constructed and publicly released to facilitate the system development and evaluation. Experimental results show that the trained 3D object detection model achieves 75% loose AP within 20 meters. Besides, the implemented system is real-time and camera carrier-independent, achieving an F1 of roughly 0.8 within 50 meters under specified settings for machines of different sizes. This study preliminarily reveals the potential and feasibility of proximity monitoring using only a 2D camera, providing a new promising and economical way for early warning of human-machine collisions.
翻译:机械撞击事故是建筑工地伤亡的主要原因之一。监测工人与机械设备的接近程度以避免人机碰撞已成为施工安全管理的重要课题。现有方法要么过于繁琐且成本高昂难以广泛应用,要么缺乏空间感知能力无法实现精准监测。为此,本研究提出一种仅使用普通2D摄像头进行近距监测的创新框架,实现实时人机碰撞预警。该框架整合了单目3D目标检测模型以从2D图像中提取空间信息,并设计后处理分类模块将接近程度划分为四级:危险、潜在危险、关注和安全。研究构建并公开了一个包含22,000张带3D标注图像的虚拟数据集,以支持系统开发与评估。实验结果表明,训练后的3D目标检测模型在20米范围内达到75%的宽松AP值。此外,所实现的系统具备实时性与摄像头载体无关性,在特定设置下对50米内不同尺寸机械的F1值可达约0.8。本研究初步揭示了仅使用2D摄像头进行近距监测的潜力与可行性,为人机碰撞预警提供了一种经济高效的新路径。