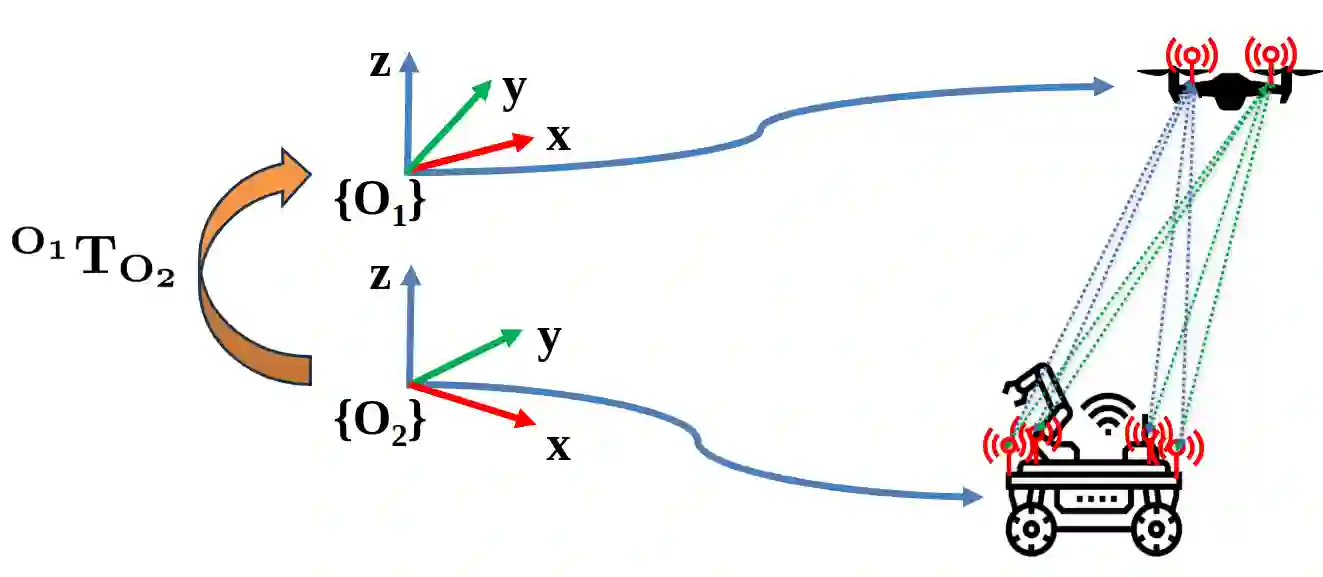
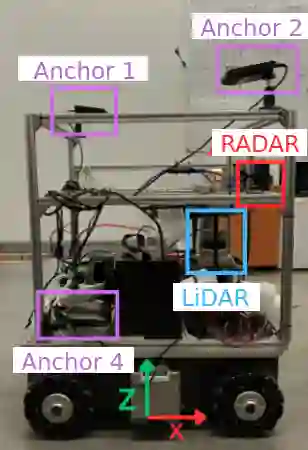
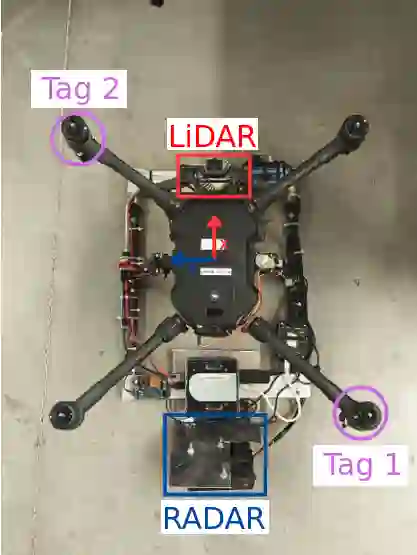
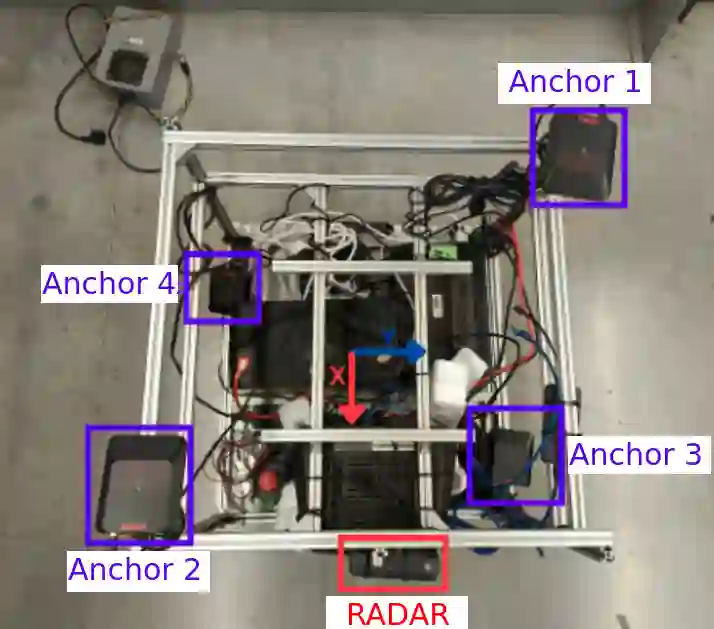
Radio-based methods such as Ultra-Wideband (UWB) and RAdio Detection And Ranging (radar), which have traditionally seen limited adoption in robotics, are experiencing a boost in popularity thanks to their robustness to harsh environmental conditions and cluttered environments. This work proposes a multi-robot UGV-UAV localization system that leverages the two technologies with inexpensive and readily-available sensors, such as Inertial Measurement Units (IMUs) and wheel encoders, to estimate the relative position of an aerial robot with respect to a ground robot. The first stage of the system pipeline includes a nonlinear optimization framework to trilaterate the location of the aerial platform based on UWB range data, and a radar pre-processing module with loosely coupled ego-motion estimation which has been adapted for a multi-robot scenario. Then, the pre-processed radar data as well as the relative transformation are fed to a pose-graph optimization framework with odometry and inter-robot constraints. The system, implemented for the Robotic Operating System (ROS 2) with the Ceres optimizer, has been validated in Software-in-the-Loop (SITL) simulations and in a real-world dataset. The proposed relative localization module outperforms state-of-the-art closed-form methods which are less robust to noise. Our SITL environment includes a custom Gazebo plugin for generating realistic UWB measurements modeled after real data. Conveniently, the proposed factor graph formulation makes the system readily extensible to full Simultaneous Localization And Mapping (SLAM). Finally, all the code and experimental data is publicly available to support reproducibility and to serve as a common open dataset for benchmarking.
翻译:诸如超宽带(UWB)与无线电探测与测距(雷达)等基于无线电的方法,传统上在机器人领域的应用有限,但由于其对恶劣环境条件和杂乱场景的鲁棒性,正日益受到青睐。本研究提出了一种多机器人UGV-UAV(地面无人车-空中无人机)定位系统,该系统结合了这两种技术,并利用低成本且易于获取的传感器(如惯性测量单元和轮式编码器),来估计空中机器人相对于地面机器人的相对位置。系统流程的第一阶段包括一个基于UWB测距数据对空中平台位置进行三边定位的非线性优化框架,以及一个适用于多机器人场景、具有松耦合自运动估计的雷达预处理模块。随后,预处理后的雷达数据以及相对变换关系被输入到一个包含里程计与机器人间约束的位姿图优化框架中。该系统已基于机器人操作系统(ROS 2)并采用Ceres优化器实现,并在软件在环仿真和真实世界数据集中得到了验证。所提出的相对定位模块在噪声鲁棒性方面优于现有闭式方法,后者对噪声的鲁棒性较差。我们的软件在环仿真环境包含一个定制的Gazebo插件,用于生成基于真实数据建模的逼真UWB测量值。此外,所提出的因子图构建方式使得该系统易于扩展至完整的同步定位与建图。最后,所有代码与实验数据均已公开,以支持可复现性,并作为一个通用的开放数据集用于基准测试。