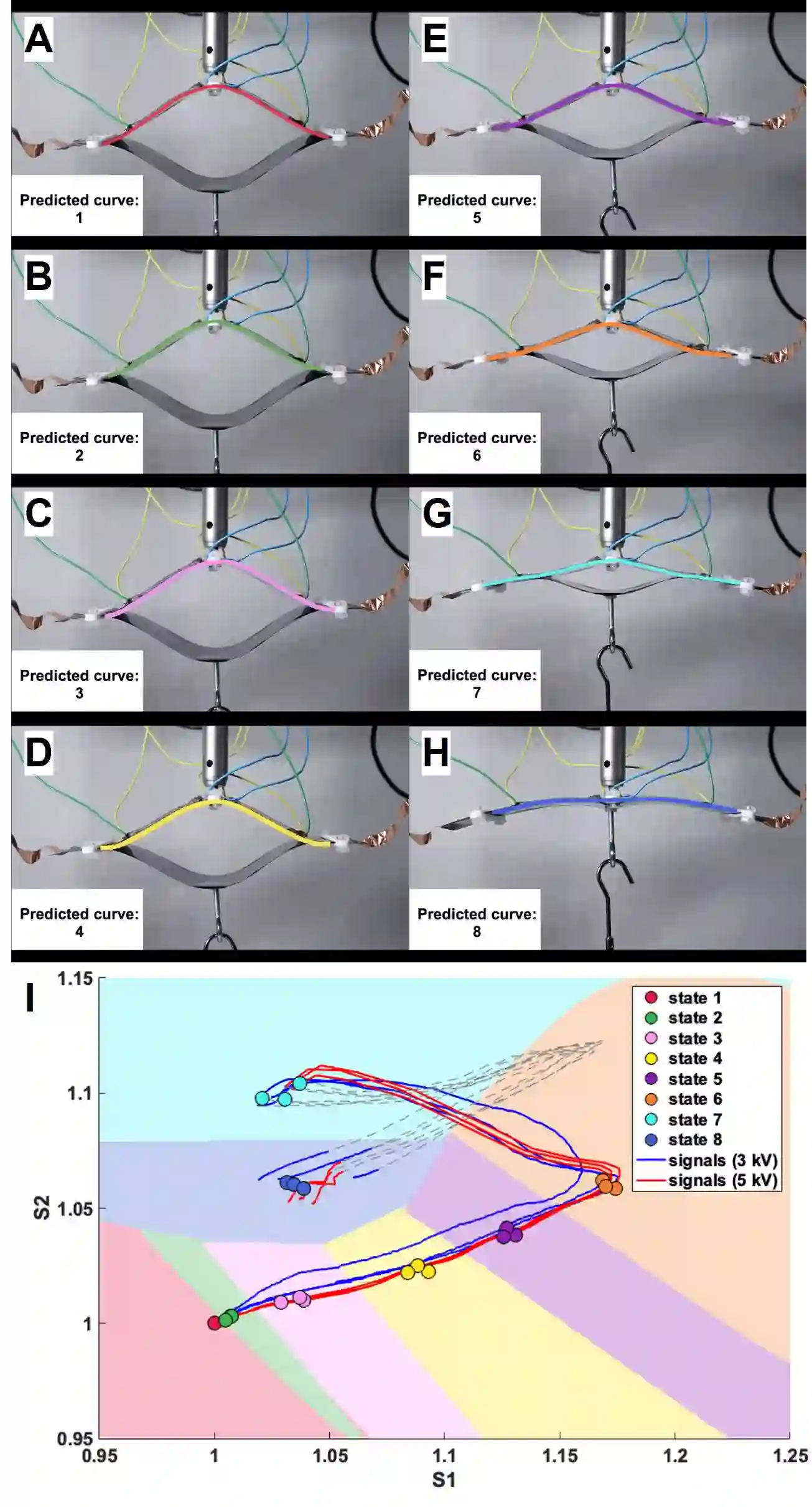
Electro-Ribbon Actuators (ERAs) are lightweight flexural actuators that exhibit ultrahigh displacement and fast movement. However, their embedded sensing relies on capacitive sensors with limited precision, which hinders accurate control. We introduce OS-ERA, an optically sensorized ERA that yields reliable proprioceptive information, and we focus on the design and integration of a sensing solution without affecting actuation. To analyse the complex curvature of an ERA in motion, we design and embed two soft optical waveguide sensors. A classifier is trained to map the sensing signals in order to distinguish eight bending states. We validate our model on six held-out trials and compare it against signals' trajectories learned from training runs. Across all tests, the sensing output signals follow the training manifold, and the predicted sequence mirrors real performance and confirms repeatability. Despite deliberate train-test mismatches in actuation speed, the signal trajectories preserve their shape, and classification remains consistently accurate, demonstrating practical voltage- and speed-invariance. As a result, OS-ERA classifies bending states with high fidelity; it is fast and repeatable, solving a longstanding bottleneck of the ERA, enabling steps toward closed-loop control.
翻译:电致带驱动器(ERAs)是一种轻质弯曲驱动器,具有超大的位移能力和快速运动特性。然而,其嵌入式传感依赖于精度有限的电容传感器,这阻碍了精确控制。本文介绍OS-ERA,一种光学传感式ERA,可提供可靠的本体感觉信息;我们重点研究了一种不影响驱动性能的传感方案的设计与集成。为分析运动过程中ERA的复杂曲率,我们设计并嵌入了两个软性光波导传感器。通过训练一个分类器来映射传感信号,以区分八种弯曲状态。我们在六组预留试验上验证了模型,并将其与训练运行中学习到的信号轨迹进行比较。在所有测试中,传感输出信号均遵循训练流形,预测序列反映了实际性能并证实了可重复性。尽管在驱动速度上故意设置了训练-测试不匹配,信号轨迹仍保持其形状,分类始终保持准确,证明了实际的电压与速度不变性。因此,OS-ERA能够高保真地分类弯曲状态;它具有快速和可重复的特点,解决了ERA长期存在的瓶颈问题,为迈向闭环控制提供了基础。