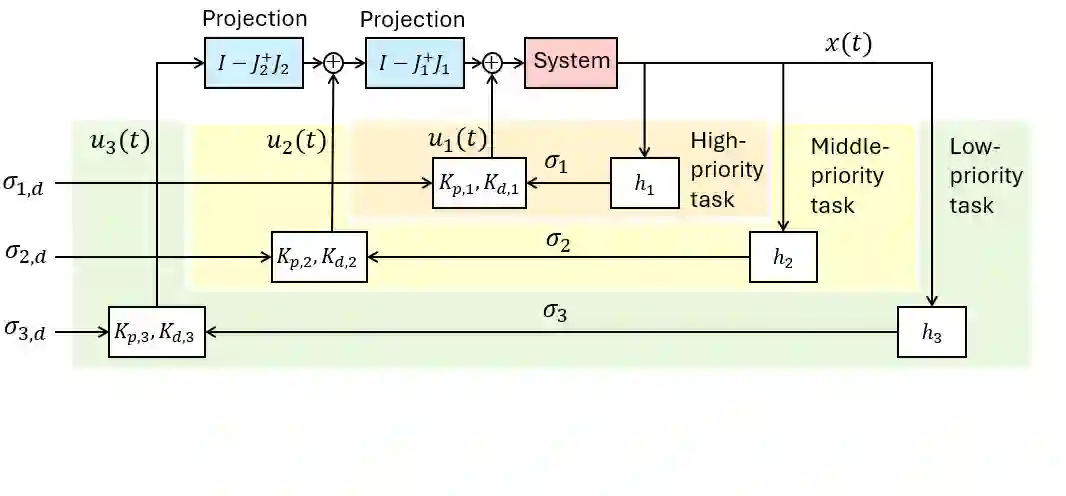
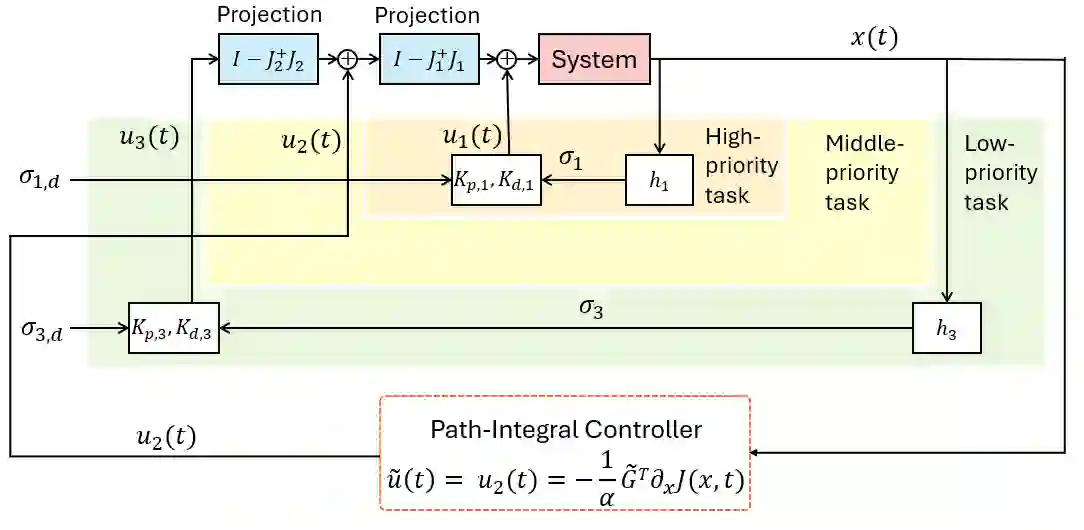
This paper addresses the problem of hierarchical task control, where a robotic system must perform multiple subtasks with varying levels of priority. A commonly used approach for hierarchical control is the null-space projection technique, which ensures that higher-priority tasks are executed without interference from lower-priority ones. While effective, the state-of-the-art implementations of this method rely on low-level controllers, such as PID controllers, which can be prone to suboptimal solutions in complex tasks. This paper presents a novel framework for hierarchical task control, integrating the null-space projection technique with the path integral control method. Our approach leverages Monte Carlo simulations for real-time computation of optimal control inputs, allowing for the seamless integration of simpler PID-like controllers with a more sophisticated optimal control technique. Through simulation studies, we demonstrate the effectiveness of this combined approach, showing how it overcomes the limitations of traditional
翻译:本文针对分层任务控制问题展开研究,该问题要求机器人系统执行具有不同优先级的多重子任务。分层控制中常用的方法是零空间投影技术,该技术可确保高优先级任务的执行不受低优先级任务干扰。尽管该方法行之有效,但其现有实现方案通常依赖于PID控制器等底层控制器,在复杂任务中易陷入次优解。本文提出一种新颖的分层任务控制框架,将零空间投影技术与路径积分控制方法相结合。我们的方法利用蒙特卡洛模拟实时计算最优控制输入,实现了类PID简单控制器与更复杂的最优控制技术的无缝集成。通过仿真研究,我们验证了这种组合方法的有效性,展示了其如何克服传统方法的局限性。