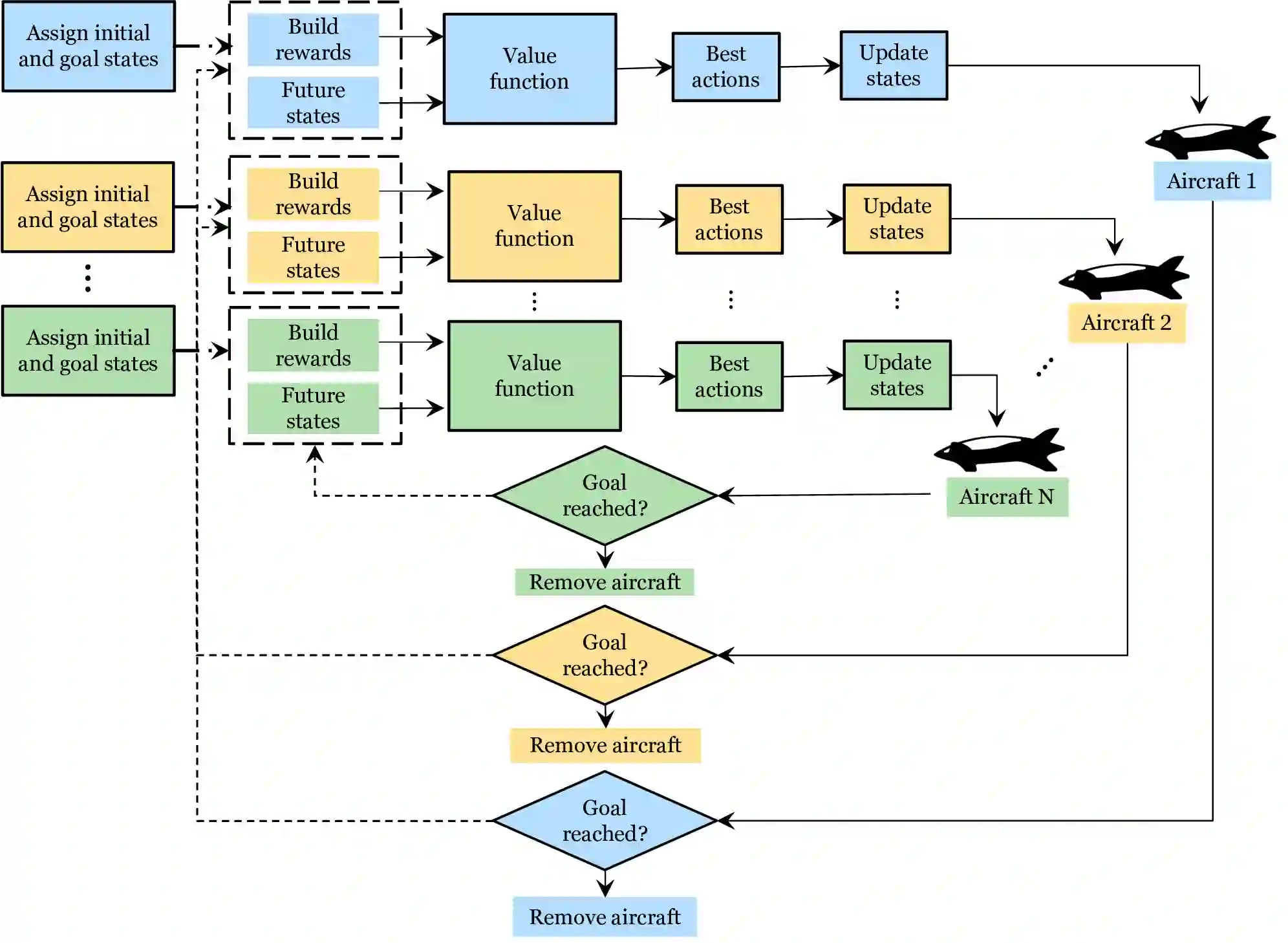
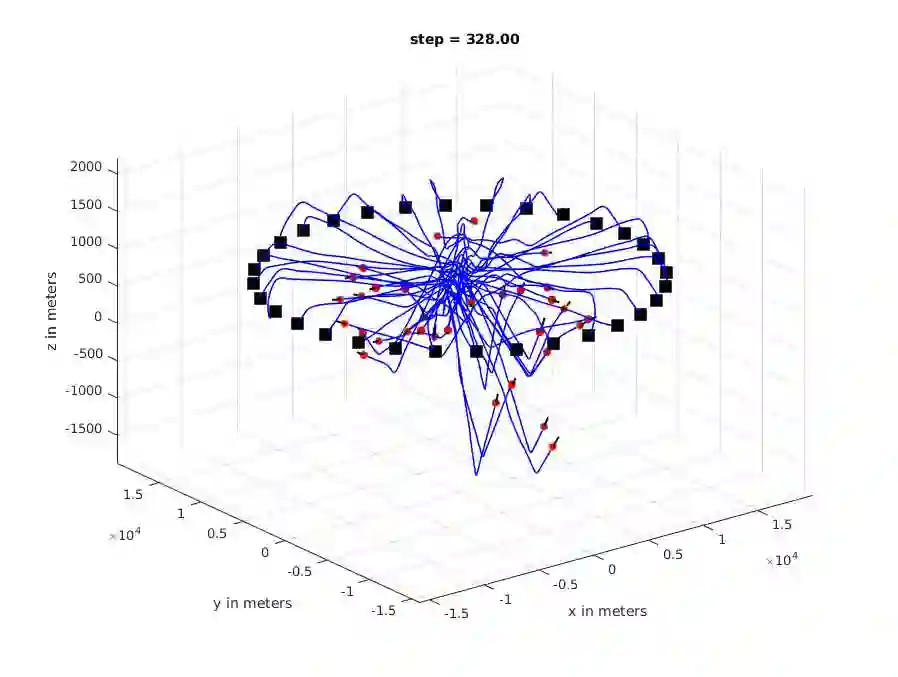
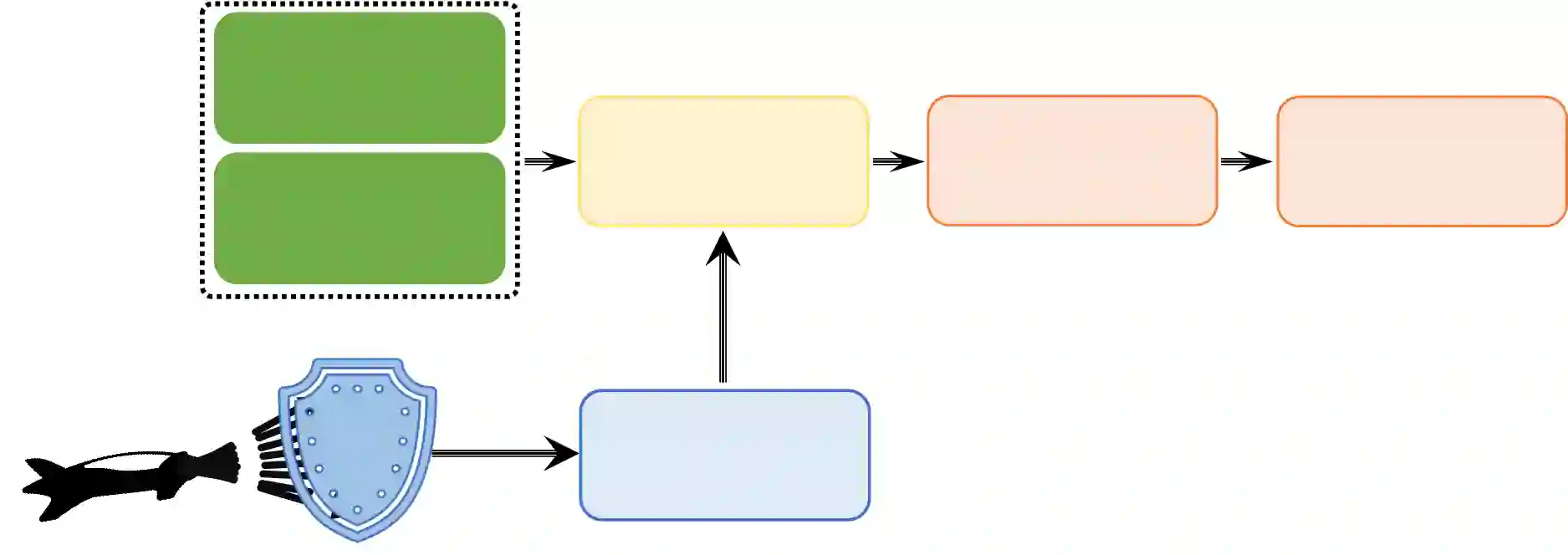
This paper presents a real-time trajectory planning framework for Urban Air Mobility (UAM) that is both safe and scalable. The proposed framework employs a decentralized, free-flight concept of operation in which each aircraft independently performs separation assurance and conflict resolution, generating safe trajectories by accounting for the future states of nearby aircraft. The framework consists of two main components: a data-driven reachability analysis tool and an efficient Markov Decision Process (MDP) based decision maker. The reachability analysis over-approximates the reachable set of each aircraft through a discrepancy function learned online from simulated trajectories. The decision maker, on the other hand, uses a 6-degrees-of-freedom guidance model of fixed-wing aircraft to ensure collision-free trajectory planning. Additionally, the proposed framework incorporates reward shaping and action shielding techniques to enhance safety performance. The proposed framework is evaluated through simulation experiments involving up to 32 aircraft in a UAM setting, with performance measured by the number of Near Mid Air Collisions (NMAC) and computational time. The results demonstrate the safety and scalability of the proposed framework.
翻译:本文提出了一种面向城市空中交通(UAM)的实时轨迹规划框架,兼具安全性与可扩展性。该框架采用分散式自由飞行运行理念,每架飞行器独立执行间隔保障与冲突消解,通过考虑邻近飞行器未来状态生成安全轨迹。框架由两大核心组件构成:数据驱动可达性分析工具与基于马尔可夫决策过程(MDP)的高效决策器。前者通过从仿真轨迹在线学习的差异函数,对每架飞行器的可达集进行过近似;后者则采用固定翼飞行器六自由度制导模型,确保无碰撞轨迹规划。此外,框架引入奖励塑形与动作屏蔽技术以增强安全性能。通过包含多达32架飞行器的UAM仿真实验进行验证,以近距空中碰撞(NMAC)次数与计算时间衡量性能。结果表明,所提框架具备良好的安全性与可扩展性。