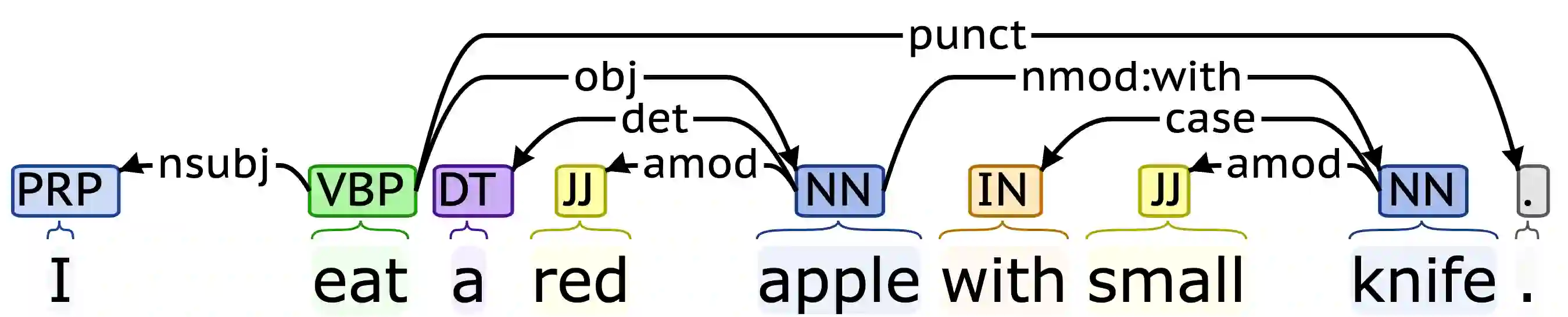
In the quest to enable robots to coexist with humans, understanding dynamic situations and selecting appropriate actions based on common sense and affordances are essential. Conventional AI systems face challenges in applying affordance, as it represents implicit knowledge derived from common sense. However, large language models (LLMs) offer new opportunities due to their ability to process extensive human knowledge. This study proposes a method for automatic affordance acquisition by leveraging LLM outputs. The process involves generating text using LLMs, reconstructing the output into a symbol network using morphological and dependency analysis, and calculating affordances based on network distances. Experiments using ``apple'' as an example demonstrated the method's ability to extract context-dependent affordances with high explainability. The results suggest that the proposed symbol network, reconstructed from LLM outputs, enables robots to interpret affordances effectively, bridging the gap between symbolized data and human-like situational understanding.
翻译:在实现机器人与人类共存的探索中,理解动态情境并基于常识和可供性选择适当行动至关重要。传统人工智能系统在应用可供性方面面临挑战,因为可供性代表了源自常识的隐含知识。然而,大语言模型(LLMs)因其处理海量人类知识的能力而提供了新的机遇。本研究提出了一种利用LLM输出自动获取可供性的方法。该过程包括使用LLMs生成文本,通过形态分析和依存分析将输出重构为符号网络,并基于网络距离计算可供性。以“苹果”为例进行的实验表明,该方法能够以高可解释性提取上下文相关的可供性。结果表明,所提出的从LLM输出重构的符号网络能使机器人有效解读可供性,从而弥合符号化数据与类人情境理解之间的鸿沟。