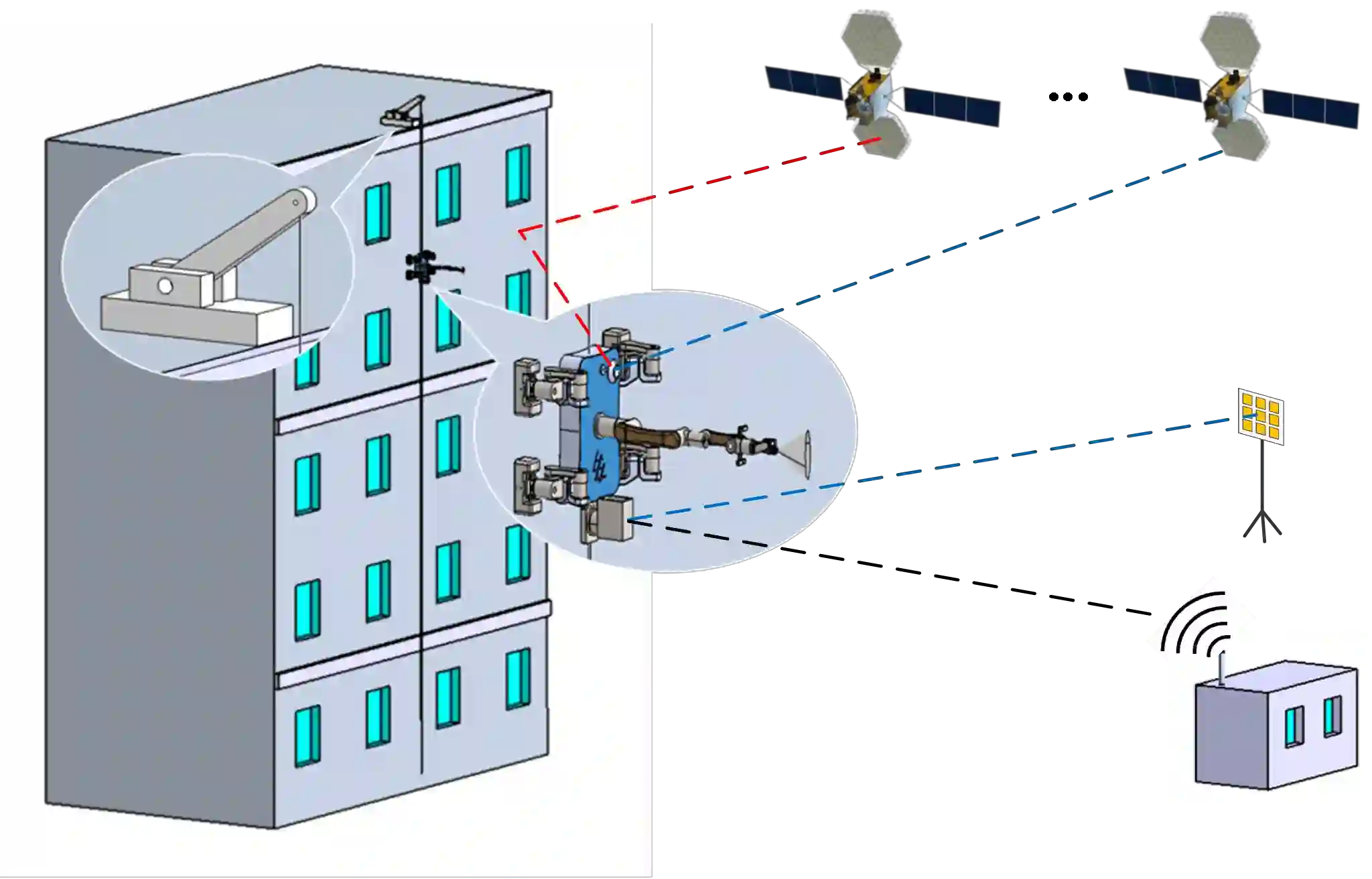
To address the need for high-precision localization of climbing robots in complex high-altitude environments, this paper proposes a multi-sensor fusion system that overcomes the limitations of single-sensor approaches. Firstly, the localization scenarios and the problem model are analyzed. An integrated architecture of Attention Mechanism-based Fusion Algorithm (AMFA) incorporating planar array Ultra-Wideband (UWB), GPS, Inertial Measurement Unit (IMU), and barometer is designed to handle challenges such as GPS occlusion and UWB Non-Line-of-Sight (NLOS) problem. Then, End-to-end neural network inference models for UWB and barometer are developed, along with a multimodal attention mechanism for adaptive data fusion. An Unscented Kalman Filter (UKF) is applied to refine the trajectory, improving accuracy and robustness. Finally, real-world experiments show that the method achieves 0.48 m localization accuracy and lower MAX error of 1.50 m, outperforming baseline algorithms such as GPS/INS-EKF and demonstrating stronger robustness.
翻译:为解决攀爬机器人在复杂高空环境中高精度定位的需求,本文提出了一种多传感器融合系统,以克服单传感器方法的局限性。首先,分析了定位场景与问题模型。设计了一种融合平面阵列超宽带(UWB)、全球定位系统(GPS)、惯性测量单元(IMU)和气压计的基于注意力机制的融合算法(AMFA)集成架构,以应对GPS遮挡和UWB非视距(NLOS)等问题。随后,开发了用于UWB和气压计的端到端神经网络推理模型,以及用于自适应数据融合的多模态注意力机制。应用无迹卡尔曼滤波器(UKF)对轨迹进行优化,提高了精度与鲁棒性。最后,真实环境实验表明,该方法实现了0.48米的定位精度和1.50米的更低最大误差,性能优于GPS/INS-EKF等基线算法,并展现出更强的鲁棒性。