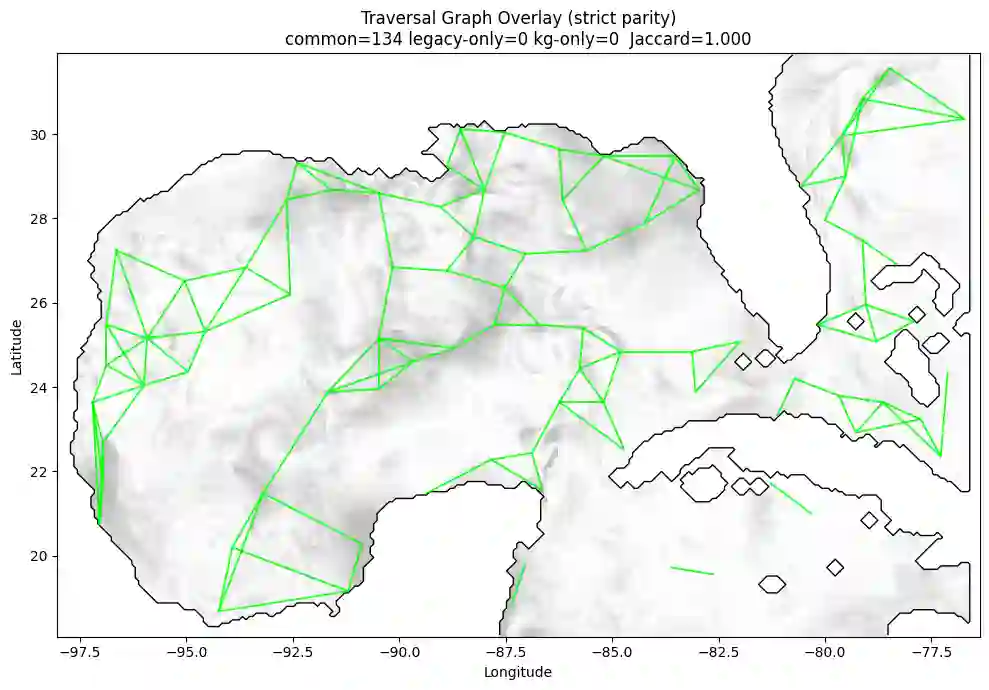
The coordination of autonomous agents in dynamic environments is hampered by the semantic gap between high-level mission objectives and low-level planner inputs. To address this, we introduce a framework centered on a Knowledge Graph (KG) that functions as an intelligent translation layer. The KG's two-plane architecture compiles declarative facts into per-agent, mission-aware ``worldviews" and physics-aware traversal rules, decoupling mission semantics from a domain-agnostic planner. This allows complex, coordinated paths to be modified simply by changing facts in the KG. A case study involving Autonomous Underwater Vehicles (AUVs) in the Gulf of Mexico visually demonstrates the end-to-end process and quantitatively proves that different declarative policies produce distinct, high-performing outcomes. This work establishes the KG not merely as a data repository, but as a powerful, stateful orchestrator for creating adaptive and explainable autonomous systems.
翻译:动态环境中自主智能体的协调受到高层任务目标与低层规划器输入间语义鸿沟的阻碍。为解决此问题,我们提出一个以知识图谱为核心的框架,其作为智能翻译层发挥作用。该知识图谱的双平面架构将声明性事实编译为面向各智能体的任务感知“世界观”及物理感知遍历规则,从而将任务语义与领域无关的规划器解耦。这使得仅需修改知识图谱中的事实即可调整复杂的协调路径。一项涉及墨西哥湾自主水下航行器的案例研究直观展示了端到端流程,并定量证明了不同的声明性策略可产生独特且高性能的结果。本工作确立了知识图谱不仅作为数据存储库,更作为创建自适应、可解释自主系统的强大状态化编排器。