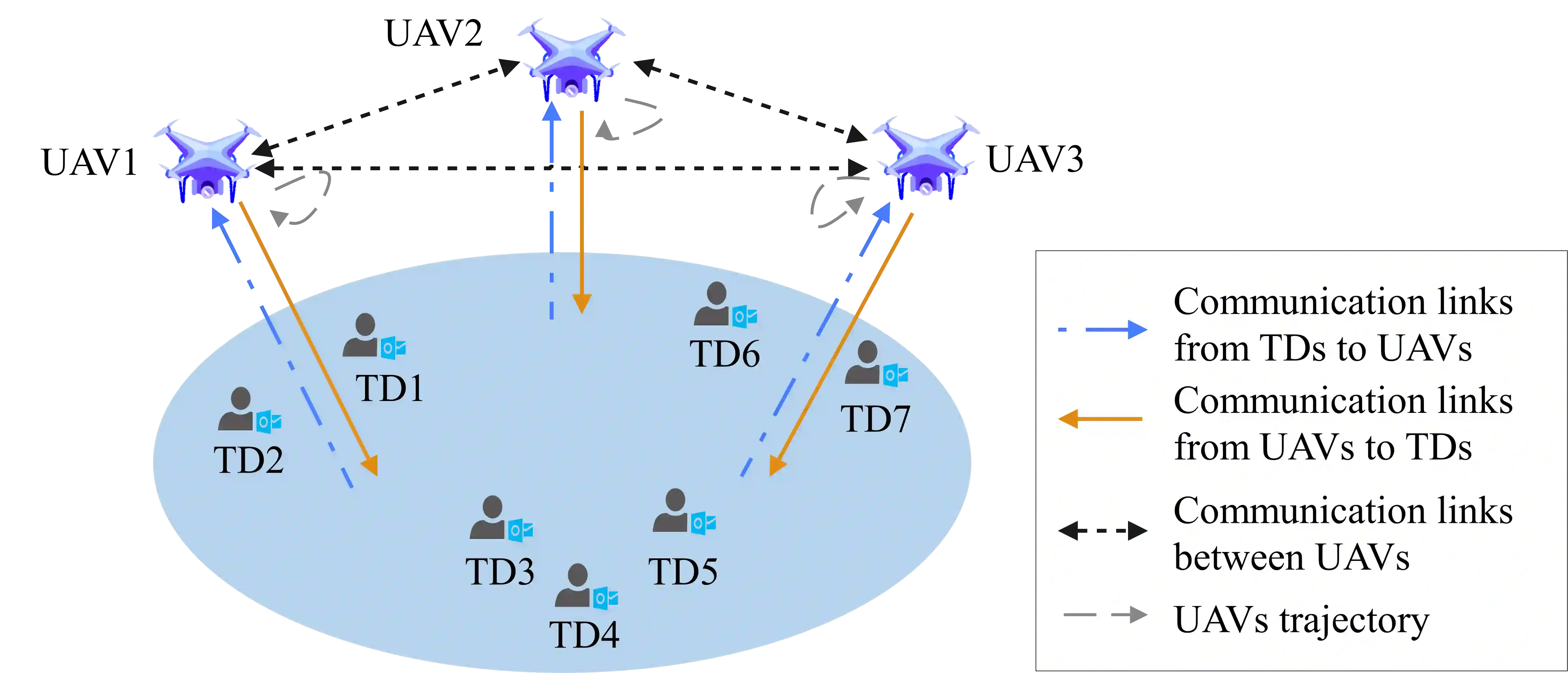
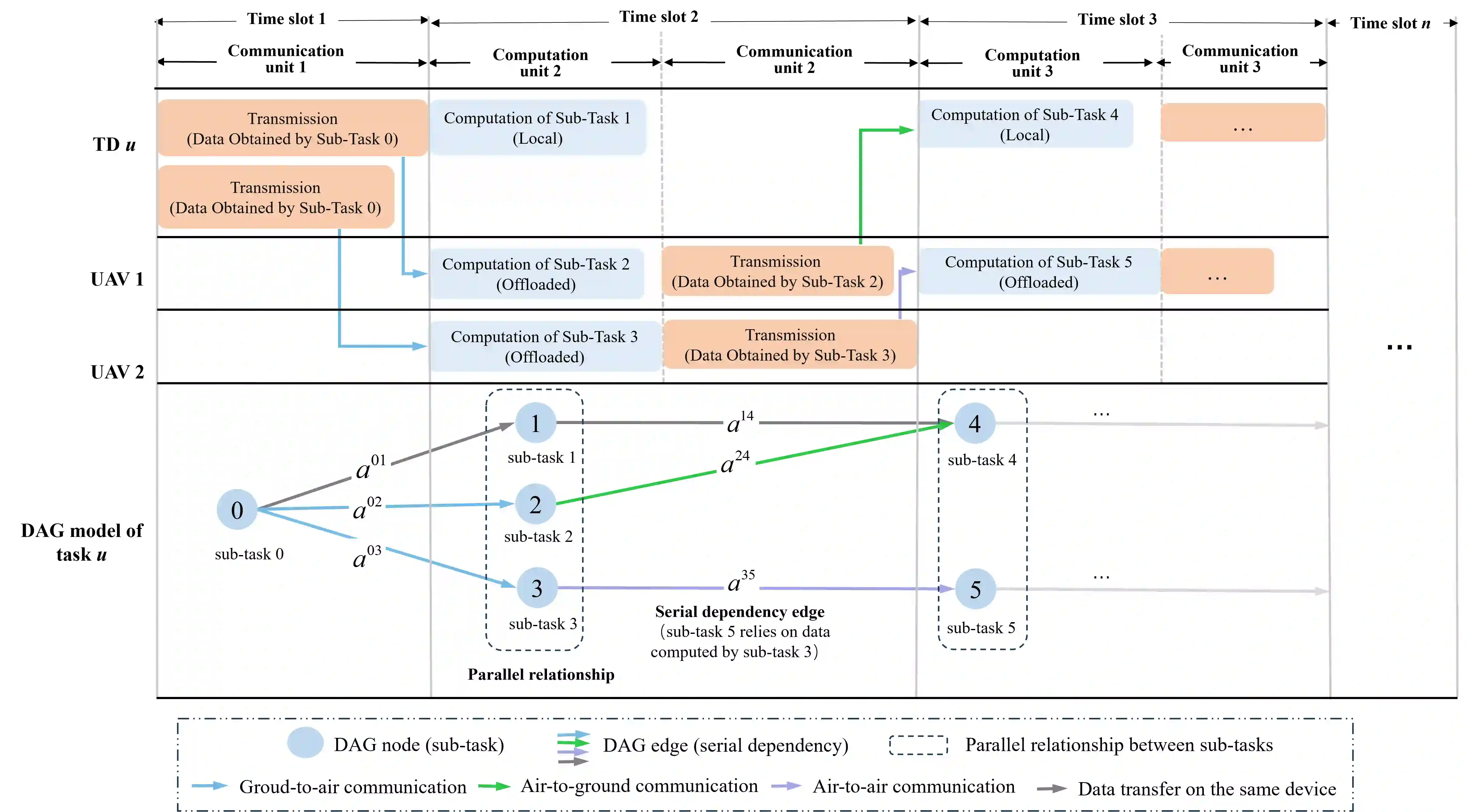
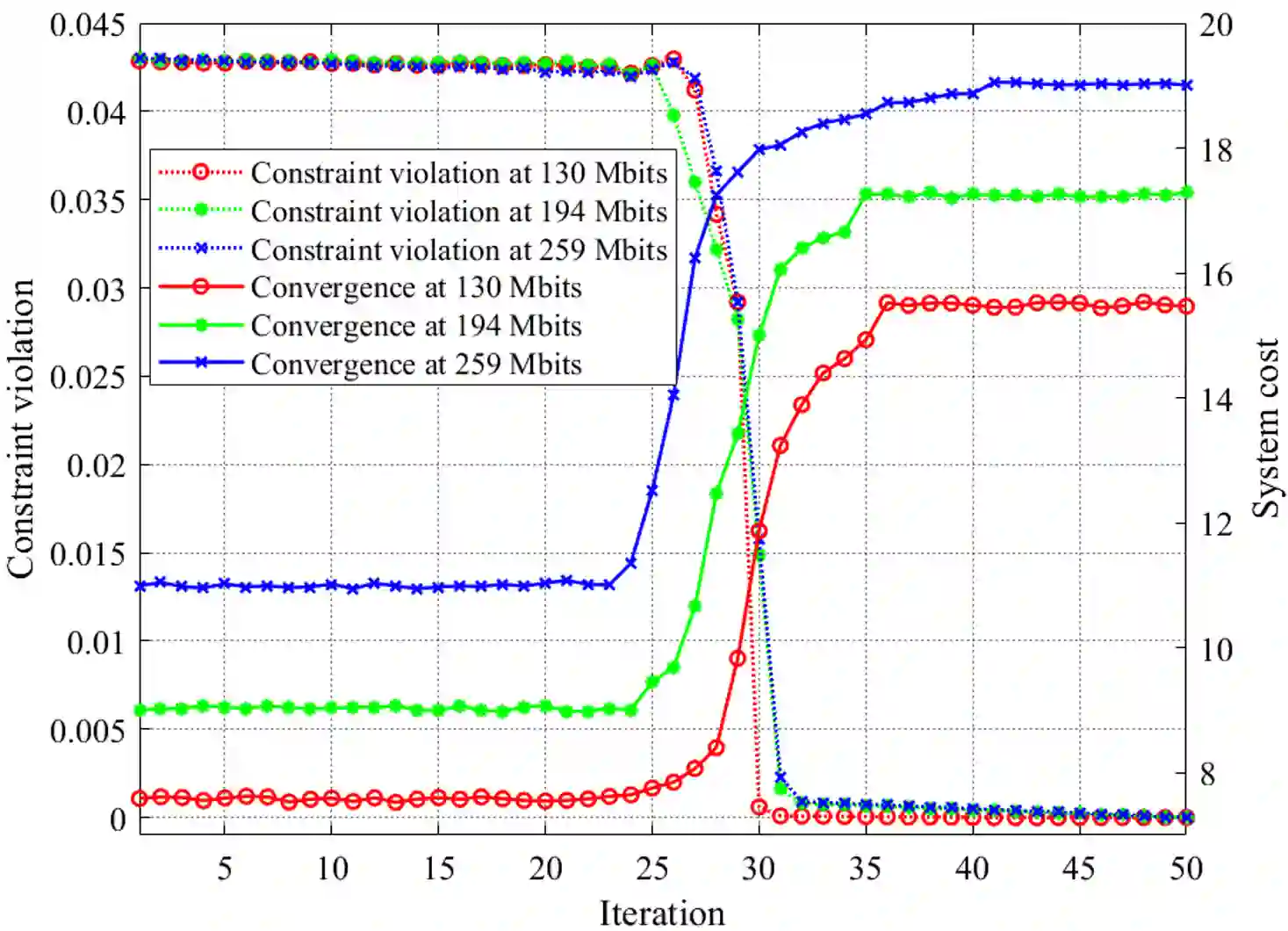
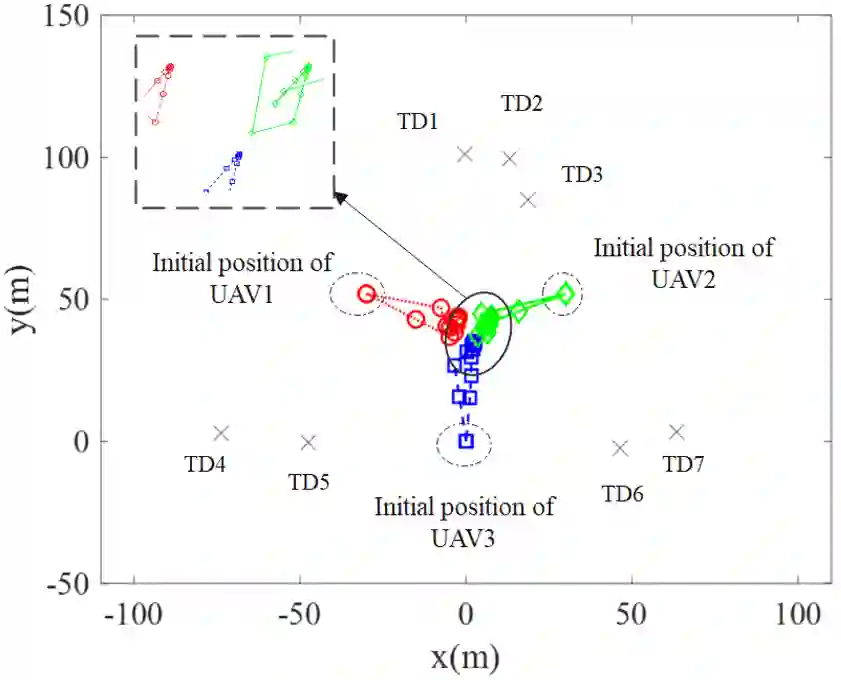
This paper proposes a novel multi-unmanned aerial vehicle (UAV) assisted collaborative mobile edge computing (MEC) framework, where the computing tasks of terminal devices (TDs) can be decomposed into serial or parallel sub-tasks and offloaded to collaborative UAVs. We first model the dependencies among all sub-tasks as a directed acyclic graph (DAG) and design a two-timescale frame structure to decouple the sub-task interdependencies for sub-task scheduling. Then, a joint sub-task offloading, computational resource allocation, and UAV trajectories optimization problem is formulated, which aims to minimize the system cost, i.e., the weighted sum of the task completion delay and the system energy consumption. To solve this non-convex mixed-integer nonlinear programming (MINLP) problem, a penalty dual decomposition and successive convex approximation (PDD-SCA) algorithm is developed. Particularly, the original MINLP problem is equivalently transferred into a continuous form relying on PDD theory. By decoupling the resulting problem into three nested subproblems, the SCA method is further combined to recast the non-convex components and obtain desirable solutions. Numerical results demonstrate that: 1) Compared to the benchmark algorithms, the proposed scheme can significantly reduce the system cost, and thus realize an improved trade-off between task latency and energy consumption; 2) The proposed algorithm can achieve an efficient workload balancing for distributed computation across multiple UAVs.
翻译:本文提出了一种新颖的多无人机辅助协作移动边缘计算框架,其中终端设备的计算任务可被分解为串行或并行子任务,并卸载至协作无人机群。我们首先将所有子任务间的依赖关系建模为有向无环图,并设计了一种双时间尺度帧结构以解耦子任务间的相互依赖关系,从而进行子任务调度。随后,构建了一个联合子任务卸载、计算资源分配与无人机轨迹优化的优化问题,其目标是最小化系统成本,即任务完成延迟与系统能耗的加权和。为解决这一非凸混合整数非线性规划问题,本文开发了一种惩罚对偶分解与逐次凸逼近算法。具体而言,基于惩罚对偶分解理论,原始混合整数非线性规划问题被等价转化为连续形式。通过将所得问题解耦为三个嵌套子问题,进一步结合逐次凸逼近方法重构非凸部分并获得理想解。数值结果表明:1) 与基准算法相比,所提方案能显著降低系统成本,从而在任务延迟与能耗之间实现更优的权衡;2) 所提算法能够在多无人机间实现分布式计算的高效负载均衡。