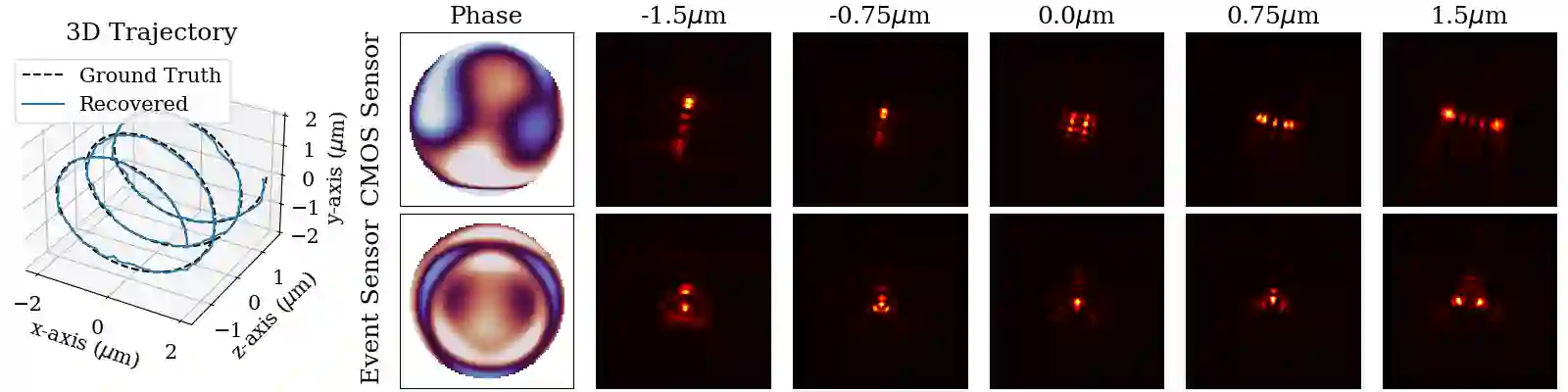
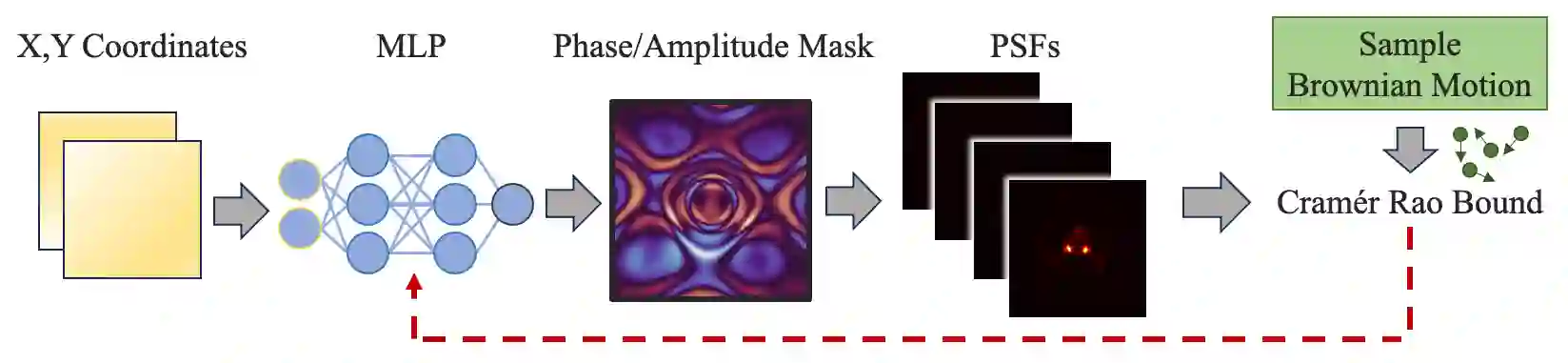
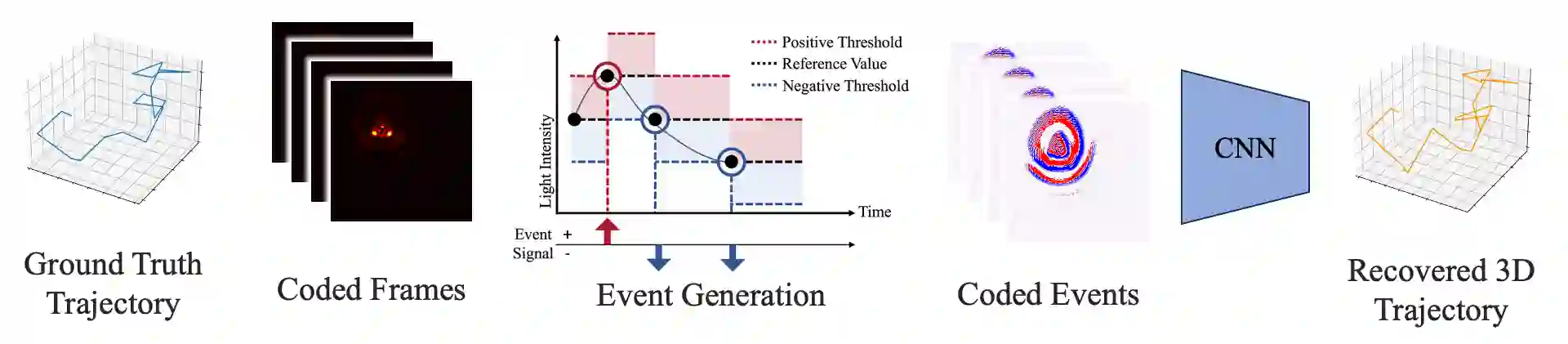
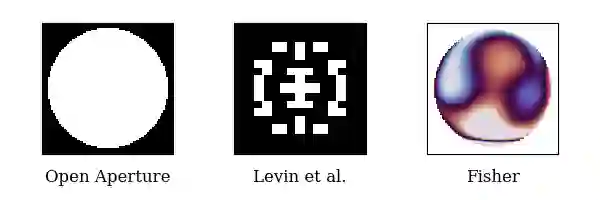
Point-spread-function (PSF) engineering is a well-established computational imaging technique that uses phase masks and other optical elements to embed extra information (e.g., depth) into the images captured by conventional CMOS image sensors. To date, however, PSF-engineering has not been applied to neuromorphic event cameras; a powerful new image sensing technology that responds to changes in the log-intensity of light. This paper establishes theoretical limits (Cram\'er Rao bounds) on 3D point localization and tracking with PSF-engineered event cameras. Using these bounds, we first demonstrate that existing Fisher phase masks are already near-optimal for localizing static flashing point sources (e.g., blinking fluorescent molecules). We then demonstrate that existing designs are sub-optimal for tracking moving point sources and proceed to use our theory to design optimal phase masks and binary amplitude masks for this task. To overcome the non-convexity of the design problem, we leverage novel implicit neural representation based parameterizations of the phase and amplitude masks. We demonstrate the efficacy of our designs through extensive simulations. We also validate our method with a simple prototype.
翻译:点扩散函数(PSF)工程是一种成熟的计算成像技术,它通过相位掩模等光学元件将额外信息(如深度)嵌入传统CMOS图像传感器捕获的图像中。然而,迄今为止,PSF工程尚未应用于神经形态事件相机——这是一种响应于光对数强度变化的强大新型图像传感技术。本文建立了PSF工程事件相机进行三维点定位与追踪的理论极限(克拉美-罗界)。利用这些界限,我们首先证明现有的Fisher相位掩模对于定位静态闪烁点源(如闪烁荧光分子)已接近最优。随后,我们证明现有设计对于追踪运动点源是次优的,并进而运用我们的理论为该任务设计了最优相位掩模与二元振幅掩模。为克服设计问题的非凸性,我们采用了基于隐式神经表征的相位与振幅掩模参数化新方法。我们通过大量仿真验证了所提设计的有效性,并使用简易原型系统对方法进行了验证。