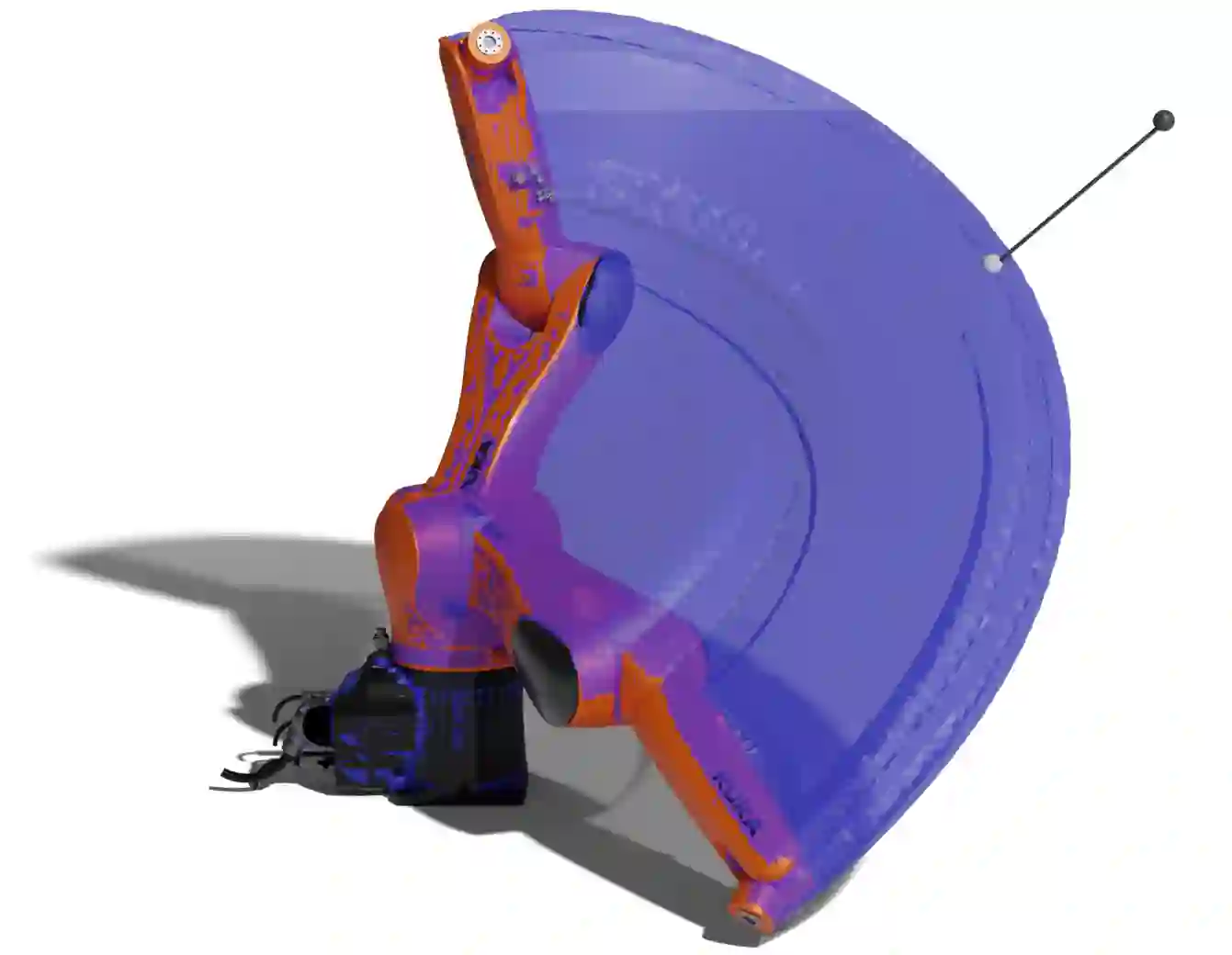
Collision detection is one of the most time-consuming operations during motion planning. Thus, there is an increasing interest in exploring machine learning techniques to speed up collision detection and sampling-based motion planning. A recent line of research focuses on utilizing neural signed distance functions of either the robot geometry or the swept volume of the robot motion. Building on this, we present a novel neural implicit swept volume model to continuously represent arbitrary motions parameterized by their start and goal configurations. This allows to quickly compute signed distances for any point in the task space to the robot motion. Further, we present an algorithm combining the speed of the deep learning-based signed distance computations with the strong accuracy guarantees of geometric collision checkers. We validate our approach in simulated and real-world robotic experiments, and demonstrate that it is able to speed up a commercial bin picking application.
翻译:碰撞检测是运动规划中最耗时的操作之一。因此,探索利用机器学习技术加速碰撞检测和基于采样的运动规划正受到越来越多的关注。近期研究聚焦于利用机器人几何体或机器人运动扫掠体的神经符号距离函数。在此基础上,本文提出一种新颖的神经隐式扫掠体模型,用于连续表示由起始和目标构型参数化的任意运动。该模型可快速计算任务空间中任意点到机器人运动的符号距离。进一步,我们提出一种算法,将基于深度学习的符号距离计算速度与几何碰撞检测器的强准确性保证相结合。我们在仿真和真实机器人实验中验证了该方法,并证明其能够加速商业抓取应用。