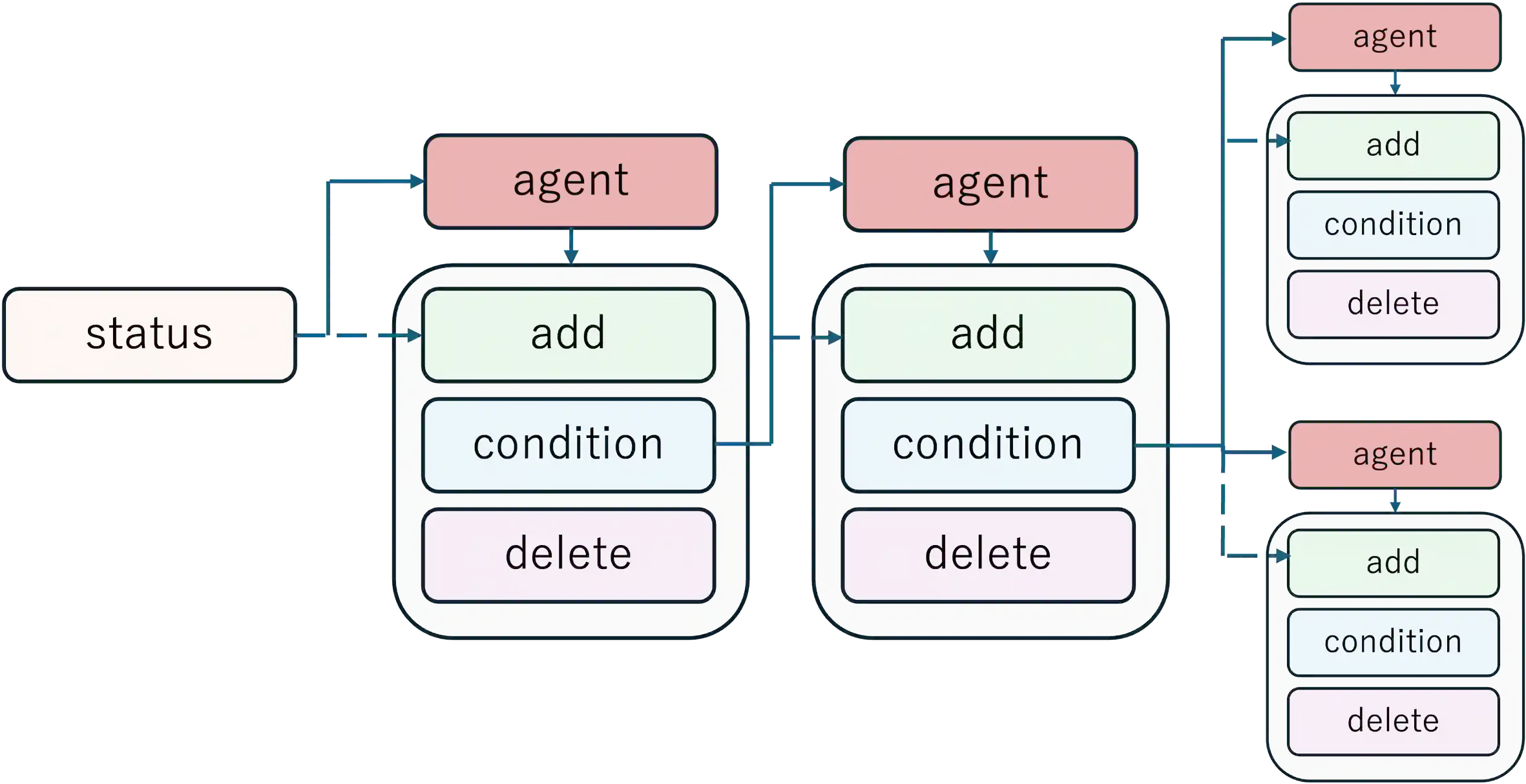
Planning methods with high adaptability to dynamic environments are crucial for the development of autonomous and versatile robots. We propose a method for leveraging a large language model (GPT-4o) to automatically generate networks capable of adapting to dynamic environments. The proposed method collects environmental "status," representing conditions and goals, and uses them to generate agents. These agents are interconnected on the basis of specific conditions, resulting in networks that combine flexibility and generality. We conducted evaluation experiments to compare the networks automatically generated with the proposed method with manually constructed ones, confirming the comprehensiveness of the proposed method's networks and their higher generality. This research marks a significant advancement toward the development of versatile planning methods applicable to robotics, autonomous vehicles, smart systems, and other complex environments.
翻译:具备高度动态环境适应性的规划方法对于开发自主且通用的机器人至关重要。我们提出了一种利用大型语言模型(GPT-4o)自动生成能够适应动态环境网络的方法。所提出的方法收集代表环境条件和目标的“状态”,并利用这些状态生成智能体。这些智能体基于特定条件相互连接,从而形成兼具灵活性与通用性的网络。我们进行了评估实验,将所提方法自动生成的网络与人工构建的网络进行比较,证实了所提方法生成网络的全面性及其更高的通用性。这项研究标志着面向机器人学、自动驾驶汽车、智能系统及其他复杂环境的通用规划方法发展取得了重要进展。