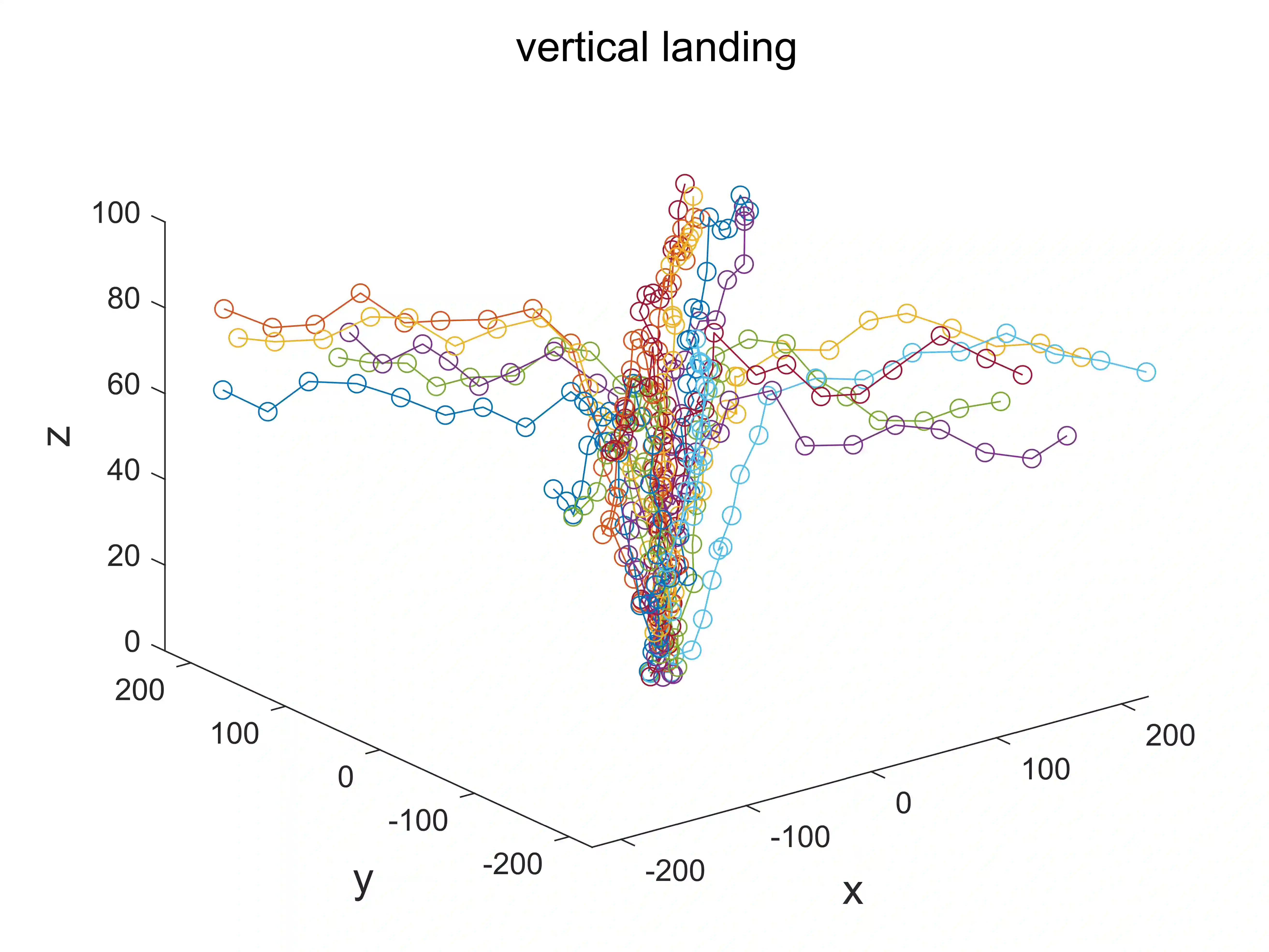
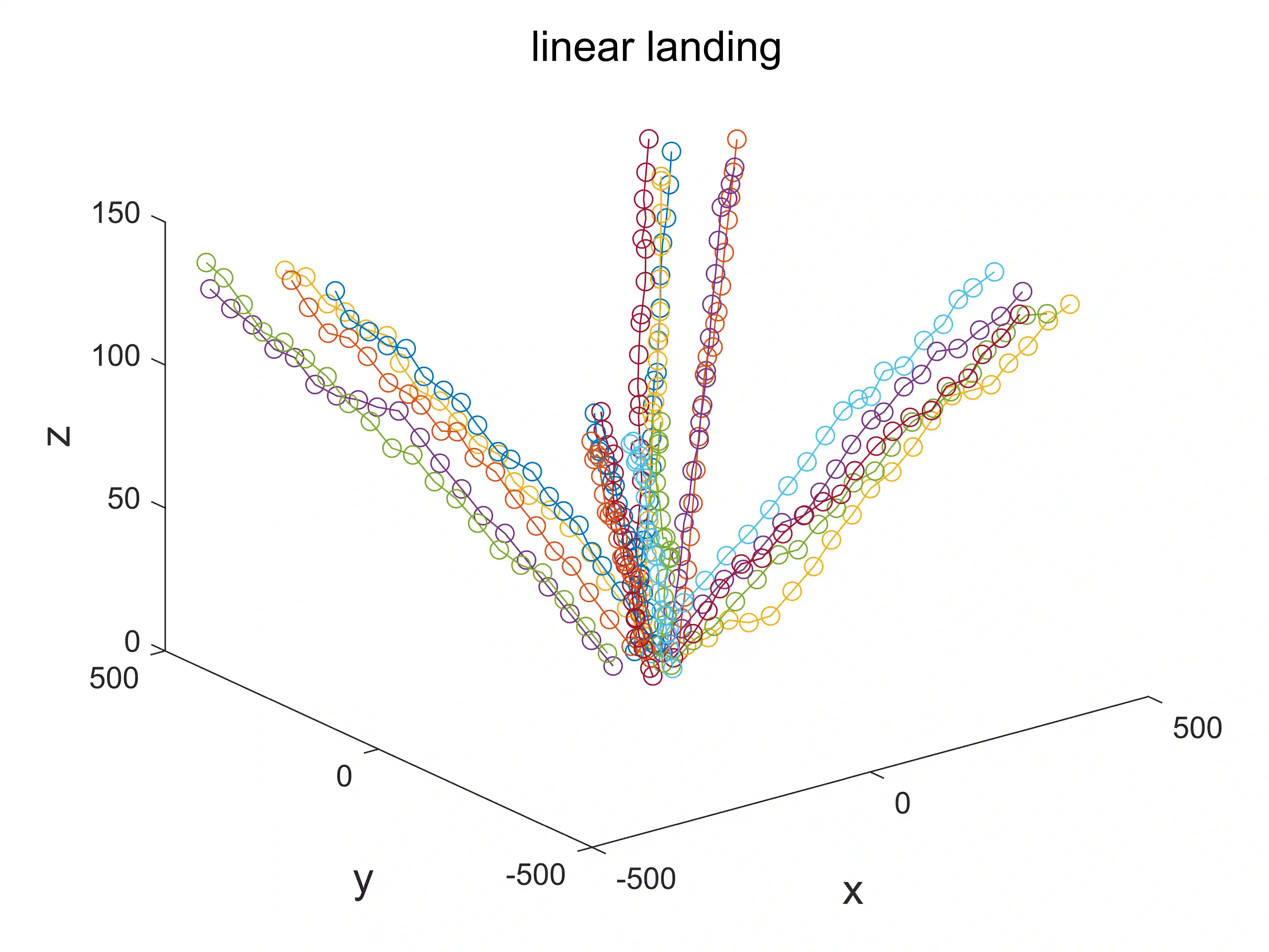
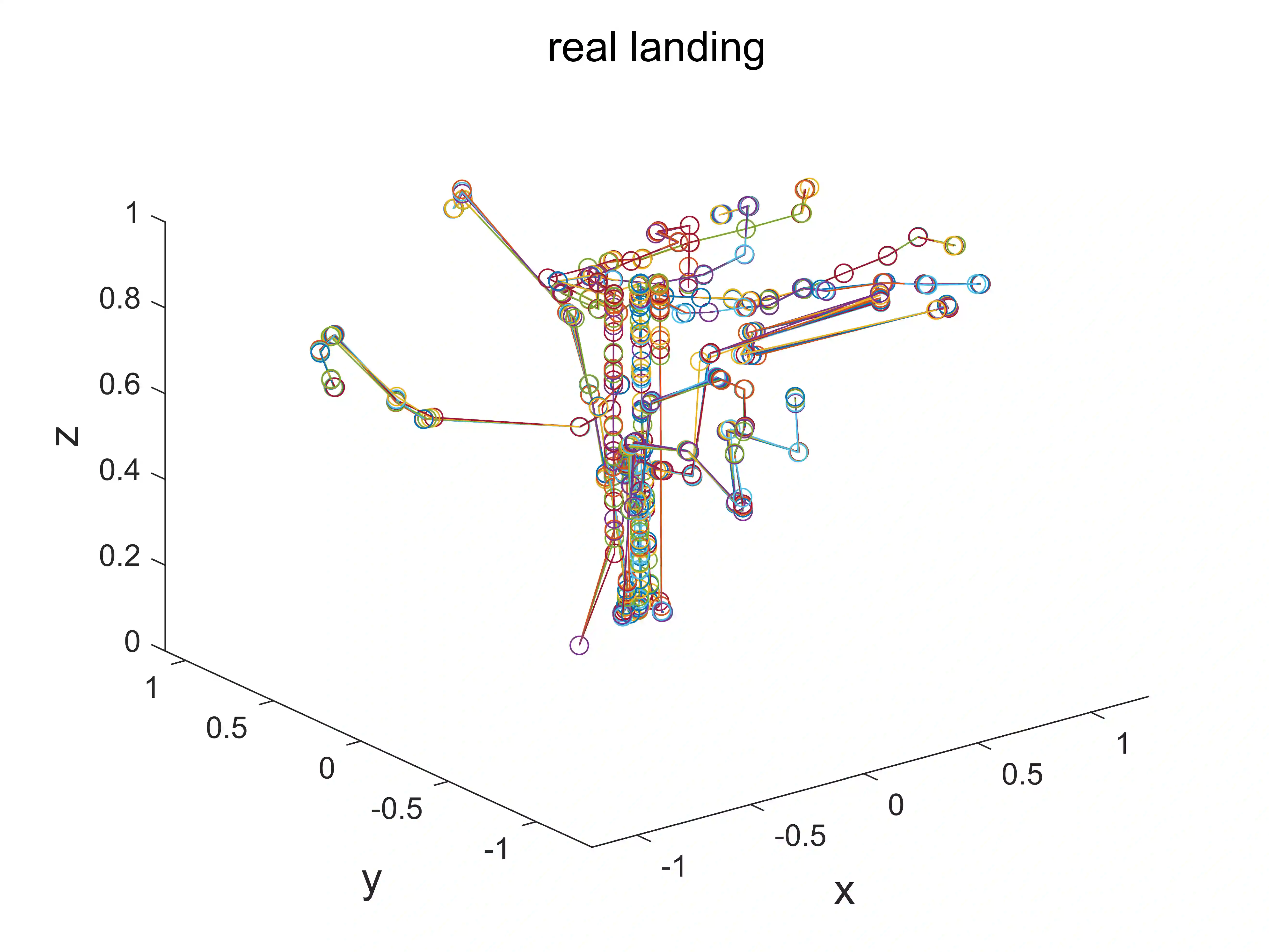
Models for trajectory prediction are an essential component of many advanced air mobility studies. These models help aircraft detect conflict and plan avoidance maneuvers, which is especially important in Unmanned Aircraft systems (UAS) landing management due to the congested airspace near vertiports. In this paper, we propose a landing trajectory prediction model for UAS based on Generative Adversarial Network (GAN). The GAN is a prestigious neural network that has been developed for many years. In previous research, GAN has achieved many state-of-the-art results in many generation tasks. The GAN consists of one neural network generator and a neural network discriminator. Because of the learning capacity of the neural networks, the generator is capable to understand the features of the sample trajectory. The generator takes the previous trajectory as input and outputs some random status of a flight. According to the results of the experiences, the proposed model can output more accurate predictions than the baseline method(GMR) in various datasets. To evaluate the proposed model, we also create a real UAV landing dataset that includes more than 2600 trajectories of drone control manually by real pilots.
翻译:轨迹预测模型是许多先进空中交通研究的关键组成部分。这些模型有助于飞行器检测冲突并规划避让机动,这在无人机系统着陆管理中尤为重要,因为垂直起降机场附近的空域通常较为拥挤。本文提出了一种基于生成对抗网络的无人机系统着陆轨迹预测模型。生成对抗网络是一种经过多年发展的著名神经网络架构。在先前的研究中,生成对抗网络已在众多生成任务中取得了多项最先进的成果。该网络由一个神经网络生成器和一个神经网络判别器构成。凭借神经网络的学习能力,生成器能够理解样本轨迹的特征。生成器以历史轨迹作为输入,输出飞行器的若干随机状态。实验结果表明,所提出的模型在不同数据集上均能输出比基准方法(高斯混合回归)更精确的预测结果。为评估模型性能,我们还创建了一个真实的无人机着陆数据集,其中包含由真实飞行员手动操控的无人机超过2600条轨迹数据。