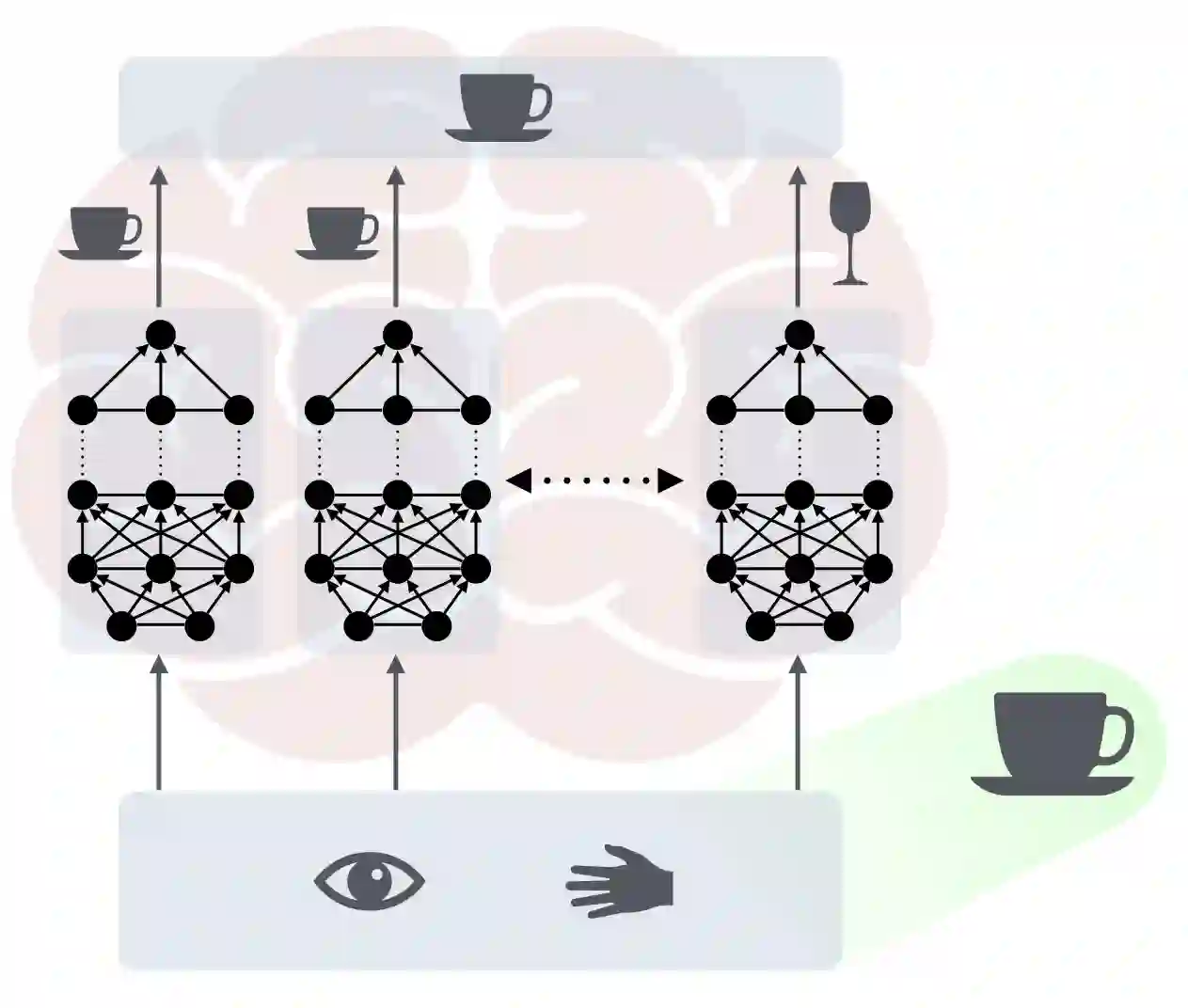
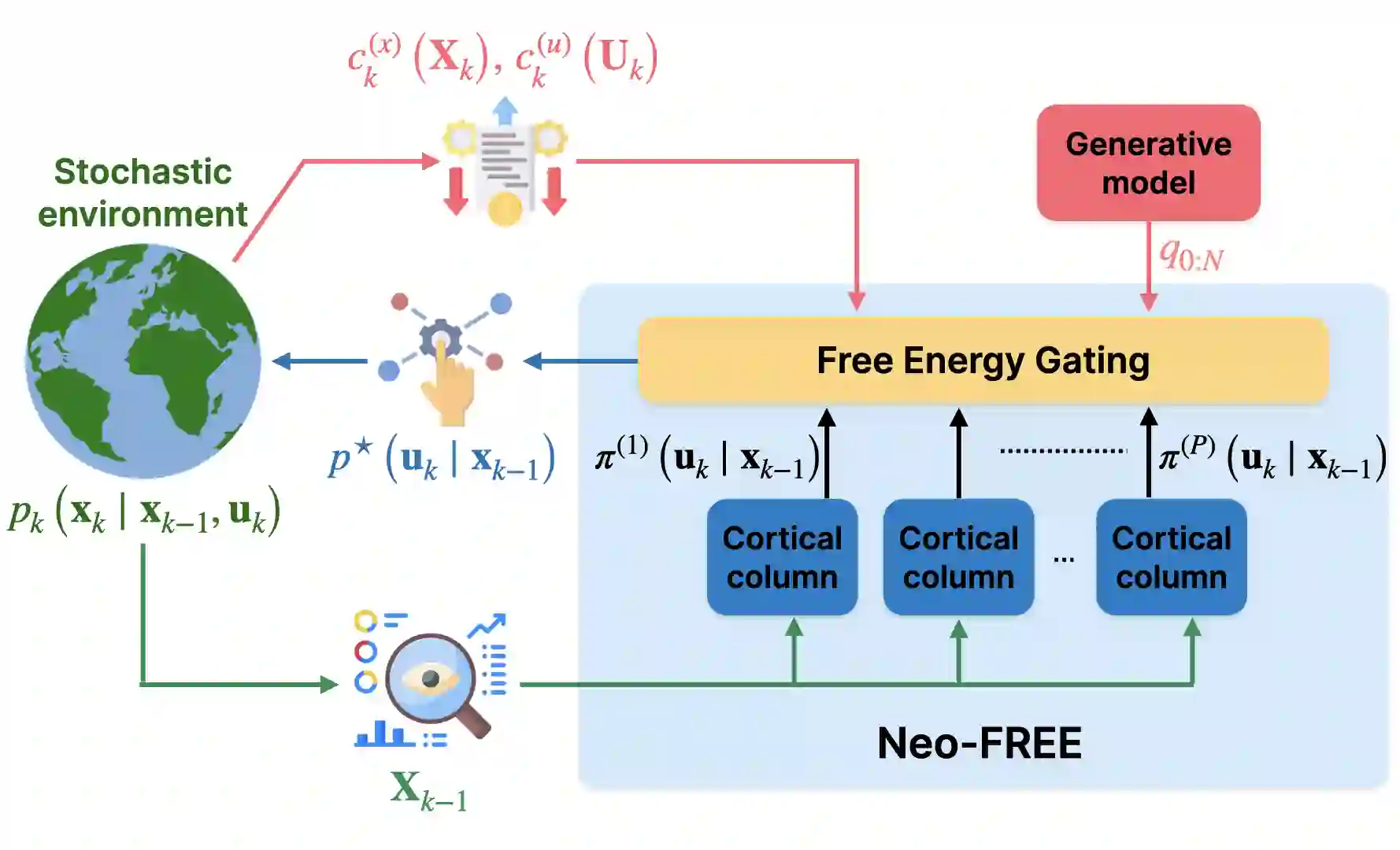
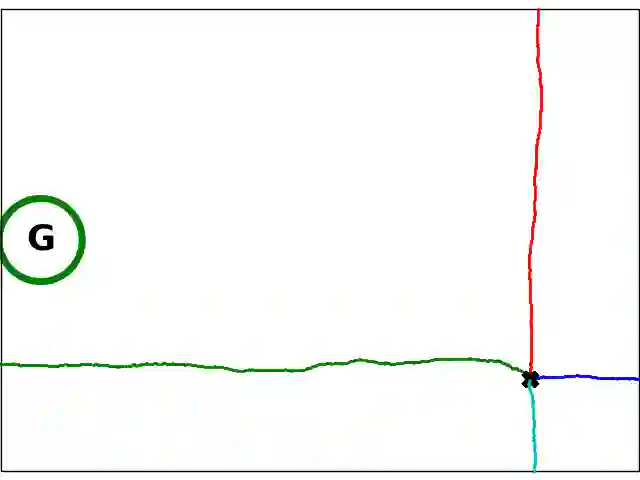
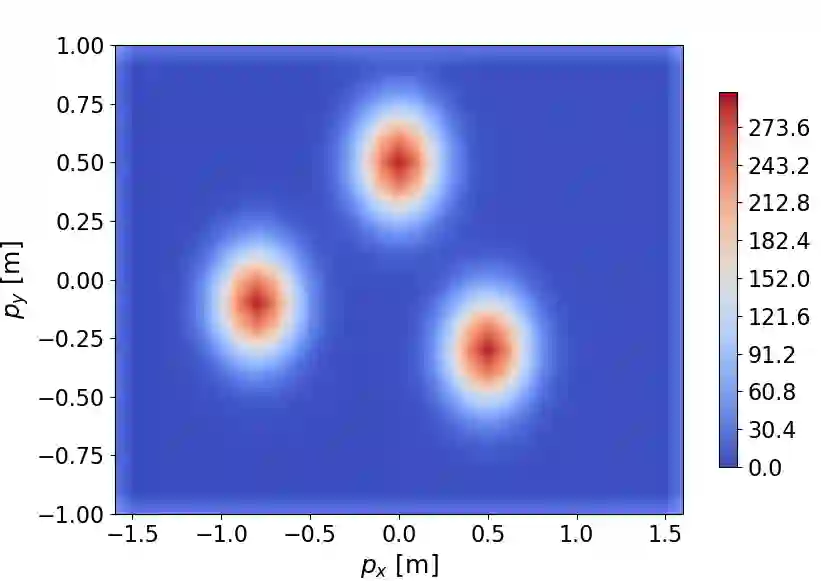
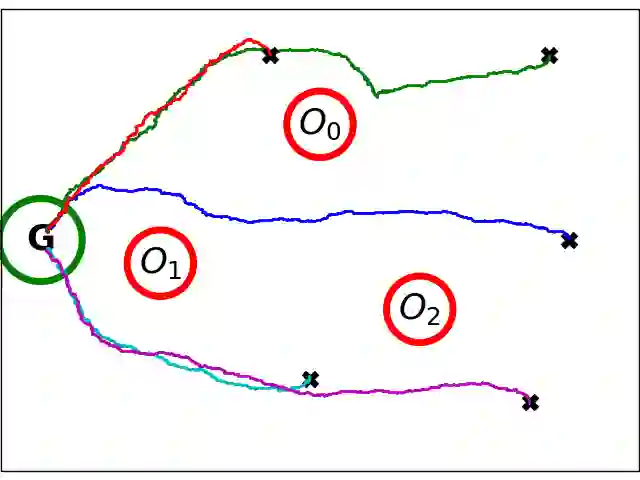
We consider the problem of optimally composing a set of primitives to tackle control tasks. To address this problem, we introduce Neo-FREE: a control architecture inspired by the Thousand Brains Theory and Free Energy Principle from cognitive sciences. In accordance with the neocortical (Neo) processes postulated by the Thousand Brains Theory, Neo-FREE consists of functional units returning control primitives. These are linearly combined by a gating mechanism that minimizes the variational free energy (FREE). The problem of finding the optimal primitives' weights is then recast as a finite-horizon optimal control problem, which is convex even when the cost is not and the environment is nonlinear, stochastic, non-stationary. The results yield an algorithm for primitives composition and the effectiveness of Neo-FREE is illustrated via in-silico and hardware experiments on an application involving robot navigation in an environment with obstacles.
翻译:我们研究了为处理控制任务而最优组合一组基元的问题。为解决此问题,我们提出了Neo-FREE:一种受认知科学中千脑理论和自由能原理启发的控制架构。根据千脑理论所假设的新皮层(Neo)处理过程,Neo-FREE由返回控制基元的功能单元组成。这些基元通过一个最小化变分自由能(FREE)的门控机制进行线性组合。寻找最优基元权重的问题随后被重新表述为一个有限时域最优控制问题,该问题即使在成本函数非凸且环境非线性、随机、非平稳的情况下也是凸的。研究结果推导出一种基元组合算法,并通过涉及机器人在有障碍物环境中导航应用的仿真与硬件实验,验证了Neo-FREE的有效性。