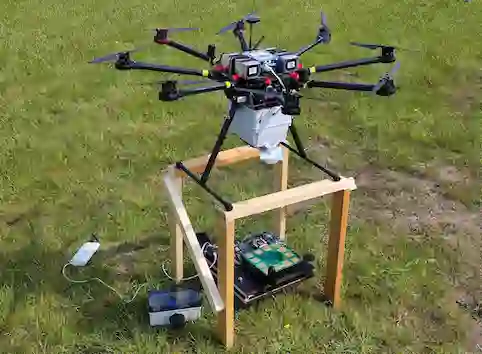
Phased-array Bluetooth systems have emerged as a low-cost alternative for performing aided inertial navigation in GNSS-denied use cases such as warehouse logistics, drone landings, and autonomous docking. Basing a navigation system off of commercial-off-the-shelf components may reduce the barrier of entry for phased-array radio navigation systems, albeit at the cost of significantly noisier measurements and relatively short feasible range. In this paper, we compare robust estimation strategies for a factor graph optimisation-based estimator using experimental data collected from multirotor drone flight. We evaluate performance in loss-of-GNSS scenarios when aided by Bluetooth angular measurements, as well as range or barometric pressure.
翻译:相控阵蓝牙系统已成为在GNSS拒止场景(如仓库物流、无人机着陆和自主对接)中实现辅助惯性导航的低成本替代方案。基于商用现货组件构建导航系统可降低相控阵无线电导航系统的应用门槛,但代价是测量噪声显著增大且有效作用距离相对较短。本文基于多旋翼无人机飞行实验数据,比较了因子图优化估计器中采用的鲁棒估计策略。我们评估了在GNSS信号丢失情况下,系统借助蓝牙角度测量以及距离或气压测量辅助时的导航性能。