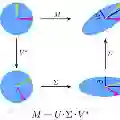
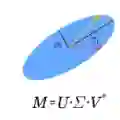
Understanding and modeling complex dynamic systems is crucial for enhancing vehicle performance and safety, especially in the context of autonomous driving. Recently, popular methods such as Koopman operators and their approximators, known as Extended Dynamic Mode Decomposition (EDMD), have emerged for their effectiveness in transforming strongly nonlinear system behavior into linear representations. This allows them to be integrated with conventional linear controllers. To achieve this, Singular Value Decomposition (SVD), specifically truncated SVD, is employed to approximate Koopman operators from extensive datasets efficiently. This study evaluates different basis functions used in EDMD and ranks for truncated SVD for representing lane change behavior models, aiming to balance computational efficiency with information loss. The findings, however, suggest that the technique of truncated SVD does not necessarily achieve substantial reductions in computational training time and results in significant information loss.
翻译:理解和建模复杂动态系统对于提升车辆性能与安全性至关重要,尤其在自动驾驶领域。近年来,Koopman算子及其近似方法——扩展动态模态分解(EDMD)——因能有效将强非线性系统行为转化为线性表示而受到广泛关注,这使得它们能够与传统线性控制器相结合。为实现这一目标,奇异值分解(SVD),特别是截断SVD,被用于从大规模数据集中高效近似Koopman算子。本研究评估了EDMD中使用的不同基函数以及截断SVD的秩在表征车道变换行为模型时的表现,旨在权衡计算效率与信息损失。然而,研究结果表明,截断SVD技术并未显著减少计算训练时间,且导致了较大的信息损失。