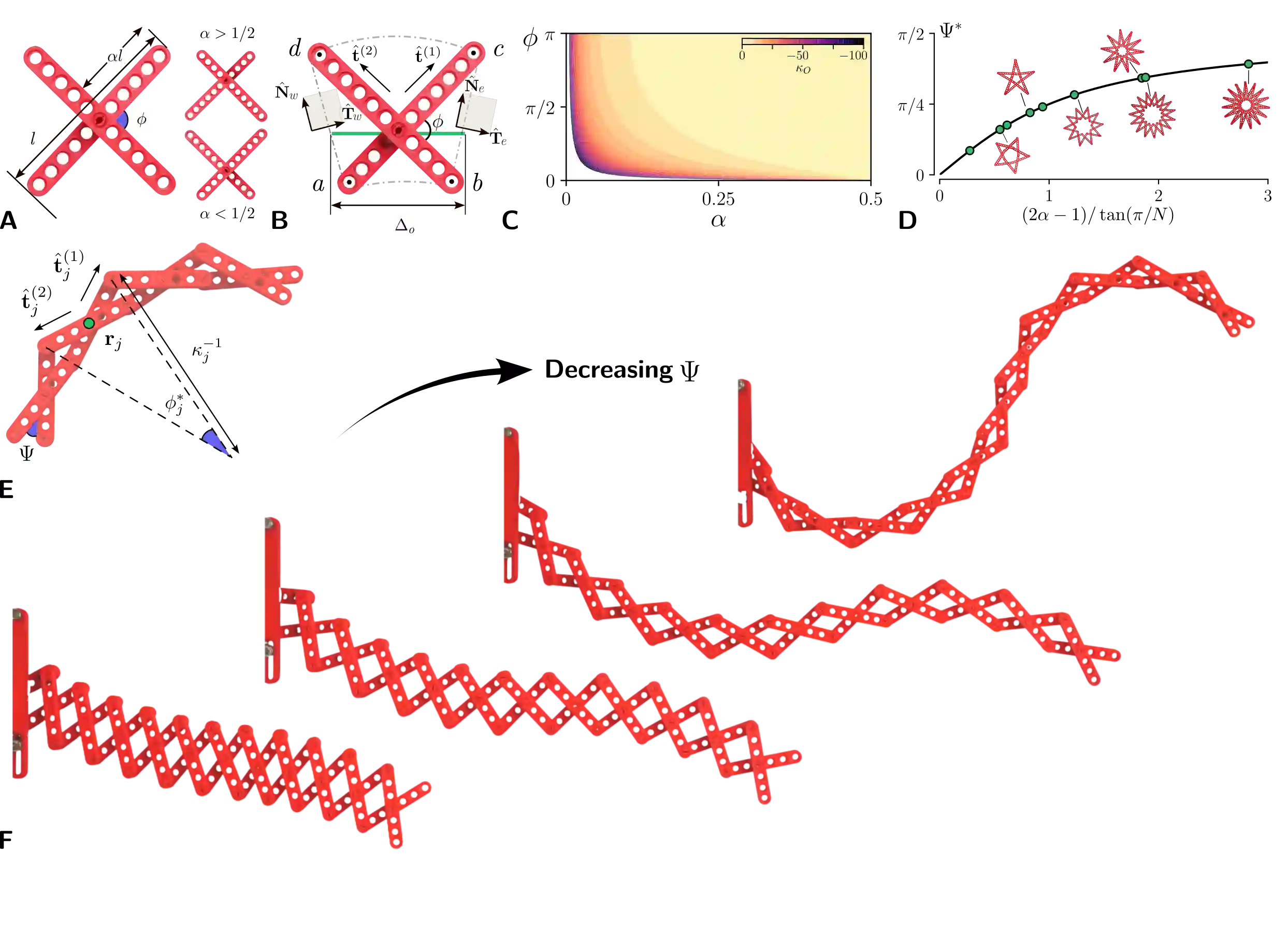
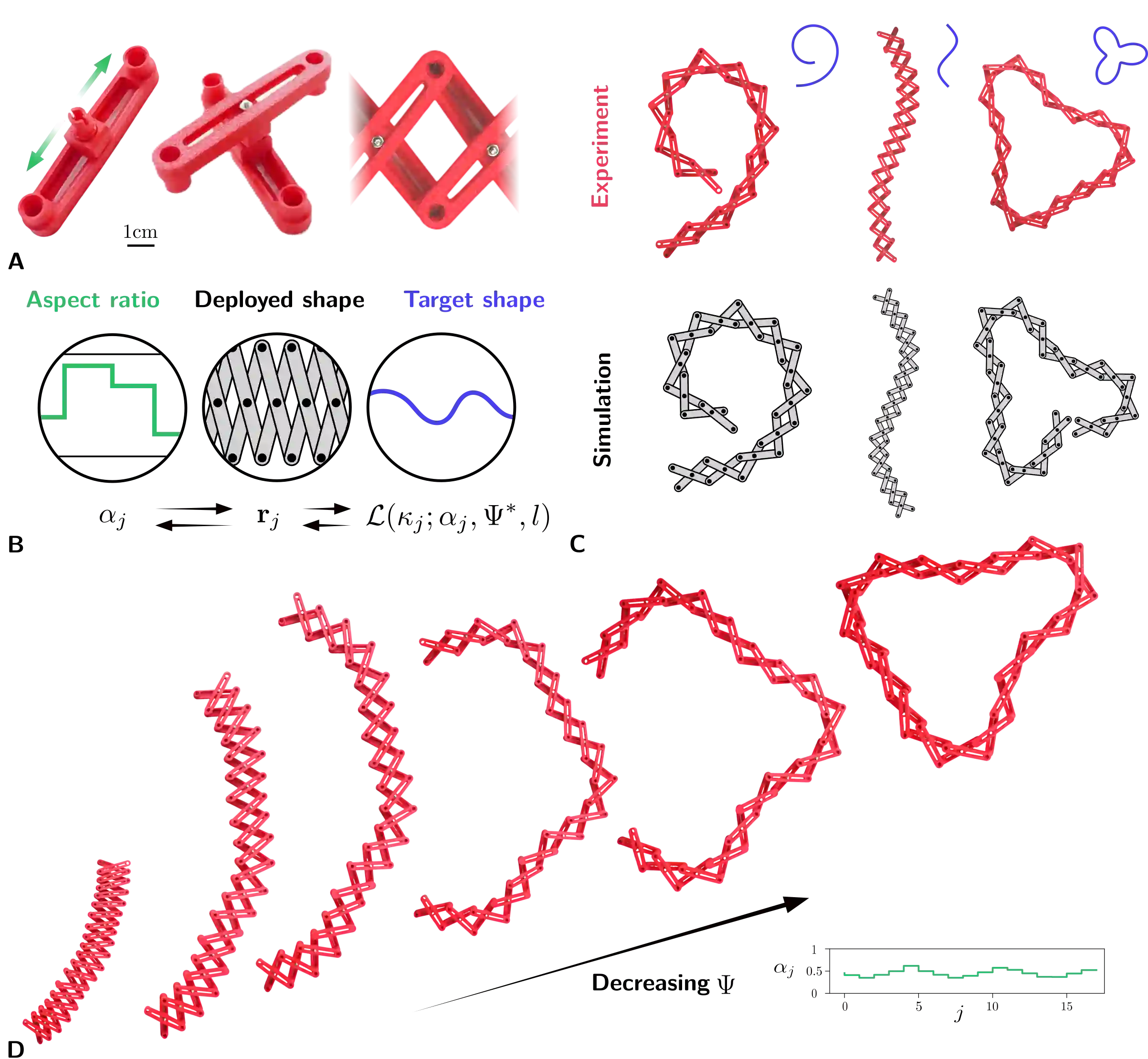
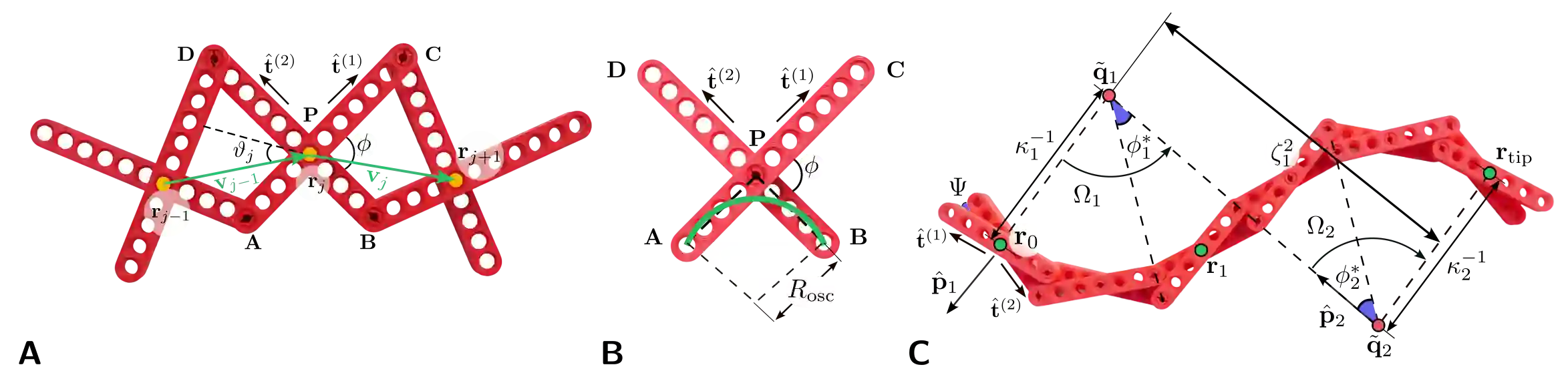
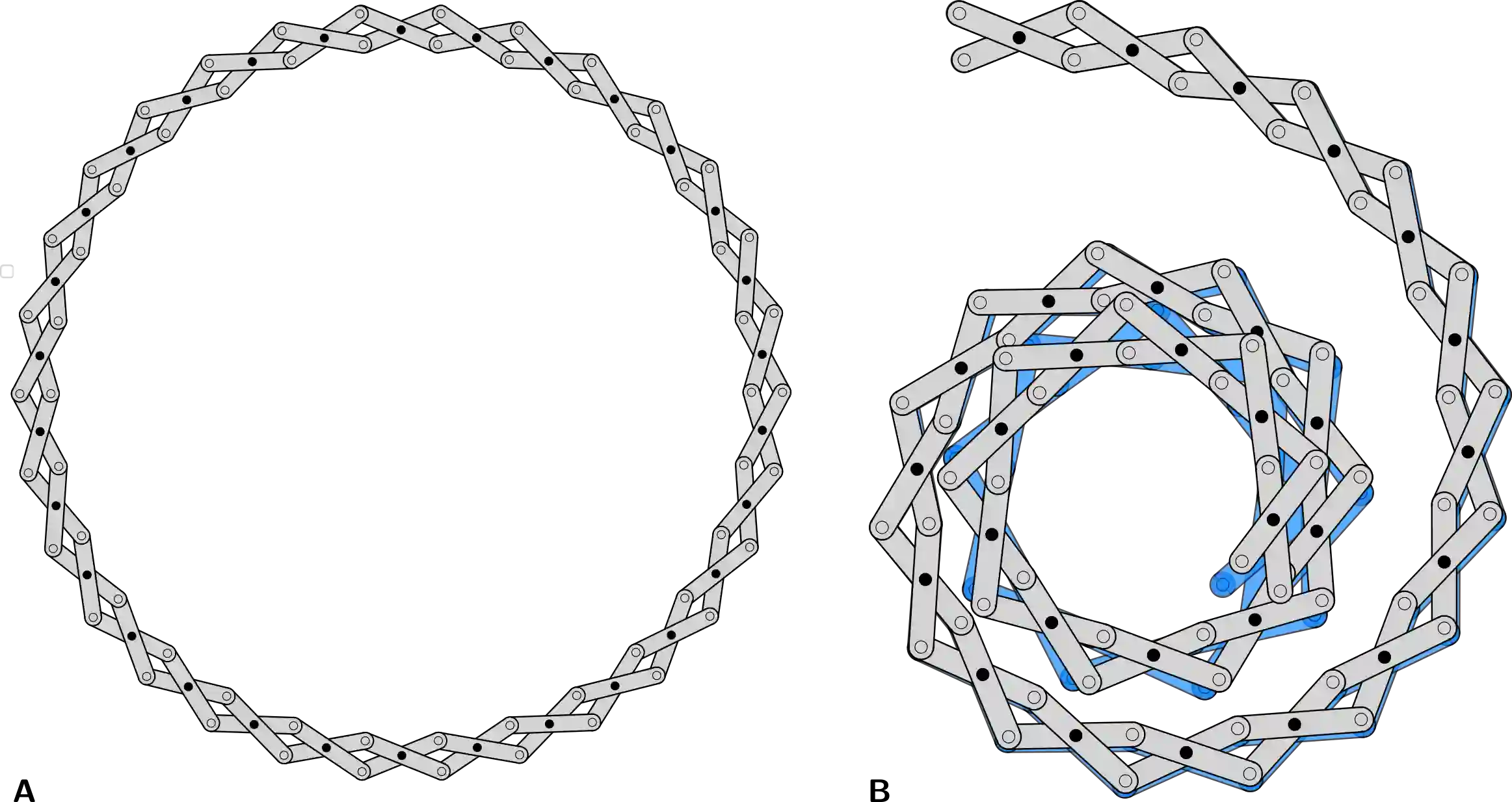
Kinematics of mechanisms is intricately coupled to their geometry and their utility often arises out of the ability to perform reproducible motion with fewer actuating degrees of freedom. In this article, we explore the assembly of scissor-units, each made of two rigid linear members connected by a pin joint. The assembly has a single degree of freedom, where actuating any single unit results in a shape change of the entire assembly. We derive expressions for the effective curvature of the unit and the trajectory of the mechanism's tip as a function of the geometric variables which we then use as the basis to program two tasks in the mechanism: shape morphing and writing. By phrasing these tasks as optimization problems and utilizing the differentiable simulation framework, we arrive at solutions that are then tested in table-top experiments. Our results show that the geometry of scissor assemblies can be leveraged for automated navigation and inspection in complex domains, in light of the optimization framework. However, we highlight that the challenges associated with rapid programming and error-free implementation in experiments without feedback still remain.
翻译:机构运动学与其几何结构紧密耦合,其应用价值通常源于能够以较少的驱动自由度实现可重复运动。本文探讨了由剪刀单元构成的装配体,每个单元由两根刚性直杆通过销轴连接而成。该装配体具有单一自由度,驱动任意单个单元即可引发整体结构的形状变化。我们推导了单元有效曲率及机构末端轨迹的表达式,这些表达式是几何变量的函数,并以此为基础在机构中编程实现两项任务:形态变换与书写。通过将任务表述为优化问题并利用可微分仿真框架,我们获得了相应解决方案,随后在桌面实验中进行了验证。结果表明,结合优化框架,剪刀装配体的几何特性可用于复杂领域的自动导航与检测。然而,我们强调,在无反馈实验中实现快速编程与无差错执行仍面临挑战。