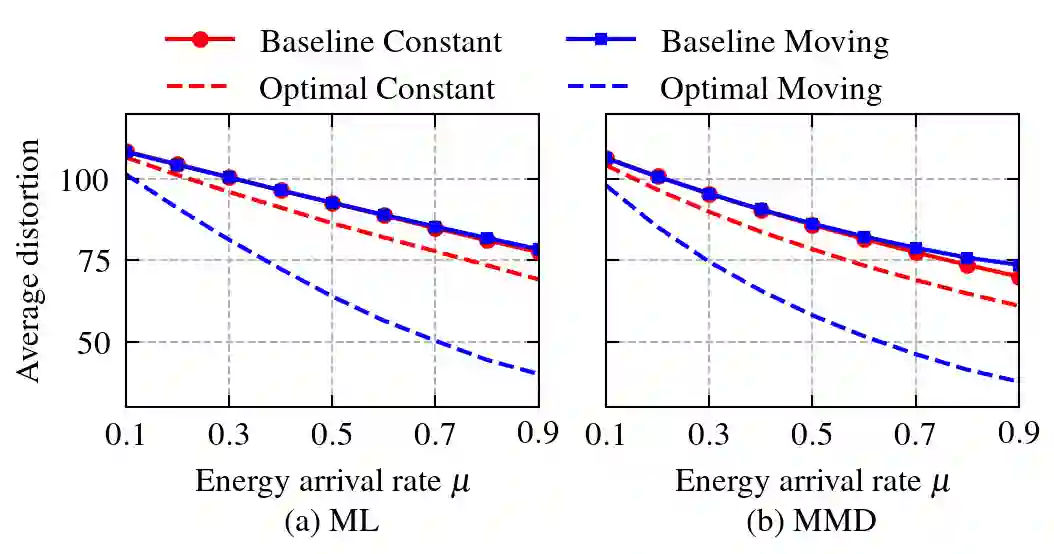
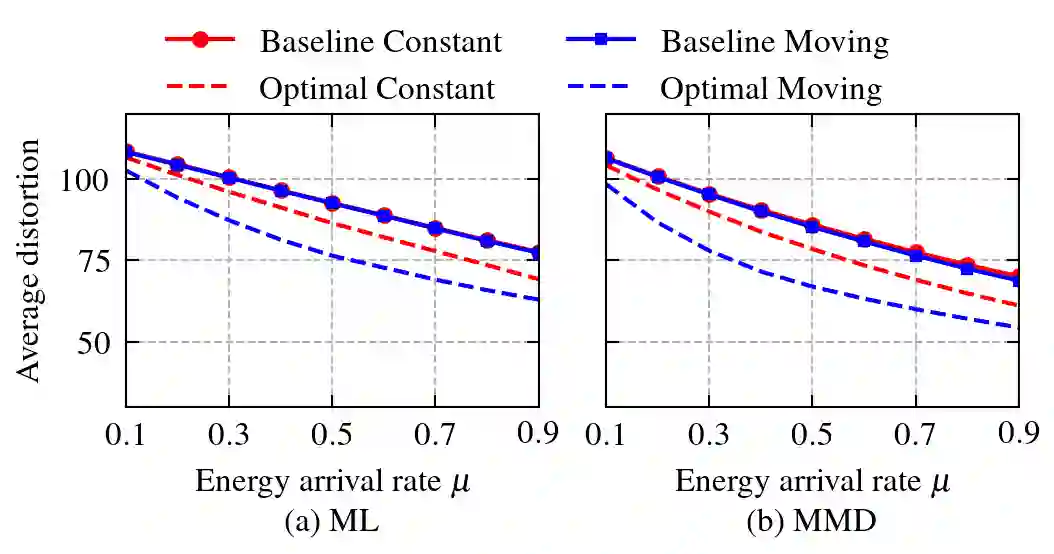
This paper investigates goal-oriented remote monitoring of an unobservable Markov source using energy-harvesting sensors that communicate with a mobile receiver, such as a Low Earth Orbit (LEO) satellite or Unmanned Aerial Vehicle (UAV). Unlike conventional systems that assume stationary base stations, the proposed framework explicitly accounts for receiver mobility, which induces time-varying channel characteristics modeled as a finite-state Markov process. The remote monitoring problem is formulated as a partially observable Markov decision process (POMDP), which is transformed into a tractable belief-state MDP and solved using relative value iteration to obtain optimal sampling and transmission policies. Two estimation strategies are considered: Maximum Likelihood (ML) and Minimum Mean Distortion (MMD). Numerical results demonstrate that incorporating receiver mobility and channel state information into the optimization reduces the average distortion by 10% to 42% compared to baseline policies and constant-channel assumptions, highlighting the importance of base station motion knowledge for effective goal-oriented communication.
翻译:本文研究利用能量收集传感器对不可观测马尔可夫源进行目标导向远程监测的问题,传感器与移动接收器(如低地球轨道卫星或无人机)通信。与传统假设基站静止的系统不同,所提框架明确考虑了接收器移动性,其引发的时变信道特性被建模为有限状态马尔可夫过程。远程监测问题被表述为部分可观测马尔可夫决策过程,并转化为可处理的信念状态MDP,通过相对值迭代求解以获得最优采样与传输策略。研究考虑了两种估计策略:最大似然估计与最小均方失真估计。数值结果表明,相较于基线策略与恒定信道假设,在优化中纳入接收器移动性与信道状态信息可将平均失真降低10%至42%,这凸显了基站运动知识对实现高效目标导向通信的重要性。