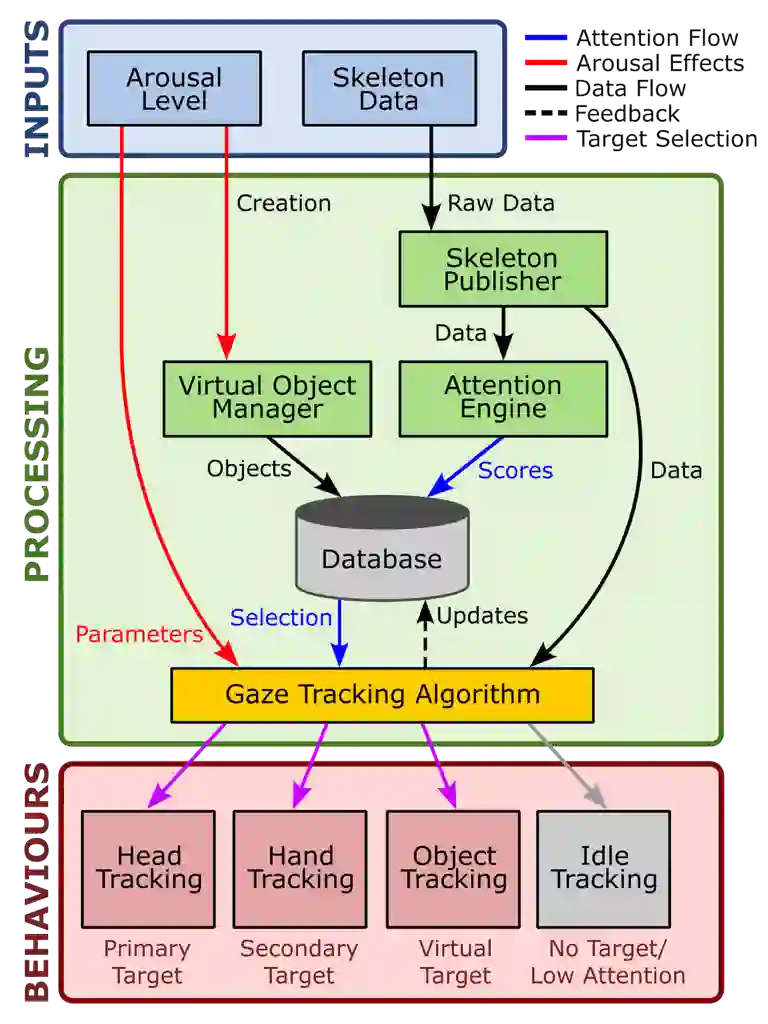
This study explores how human perceptions of a non-anthropomorphic robotic manipulator are shaped by two key dimensions of behaviour: arousal, defined as the robot's movement energy and expressiveness, and attention, defined as the robot's capacity to selectively orient toward and engage with a user. We introduce a novel control architecture that integrates a gaze-like attention engine with an arousal-modulated motion system to generate socially meaningful behaviours. In a user study, we find that robots exhibiting high attention -- actively directing their focus toward users -- are perceived as warmer and more competent, intentional, and lifelike. In contrast, high arousal -- characterized by fast, expansive, and energetic motions -- increases perceptions of discomfort and disturbance. Importantly, a combination of focused attention and moderate arousal yields the highest ratings of trust and sociability, while excessive arousal diminishes social engagement. These findings offer design insights for endowing non-humanoid robots with expressive, intuitive behaviours that support more natural human-robot interaction.
翻译:本研究探讨了人类对非拟人化机器人操作臂的感知如何受行为两个关键维度的影响:唤醒(定义为机器人的运动能量与表现力)和注意(定义为机器人选择性朝向用户并与之互动的能力)。我们提出了一种新颖的控制架构,该架构将类注视注意引擎与唤醒调制的运动系统相结合,以生成具有社会意义的行为。在一项用户研究中,我们发现,表现出高注意——即主动将焦点导向用户——的机器人被感知为更温暖、更有能力、更具意图性和更生动。相反,高唤醒——以快速、大幅度且充满活力的运动为特征——会增加不适感和干扰感。重要的是,集中的注意与适度的唤醒相结合,能获得最高的信任度和社交性评分,而过度的唤醒则会削弱社会参与度。这些发现为赋予非人形机器人富有表现力、直观的行为提供了设计见解,以支持更自然的人机交互。