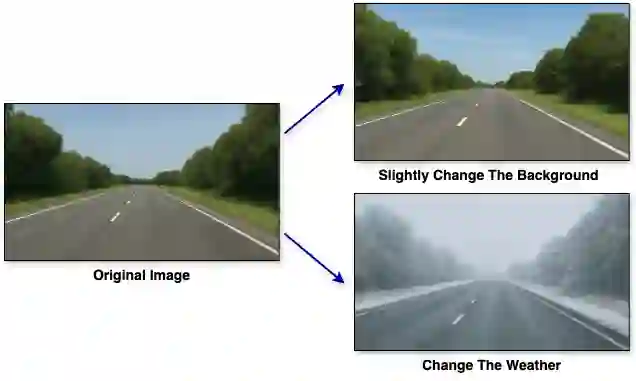
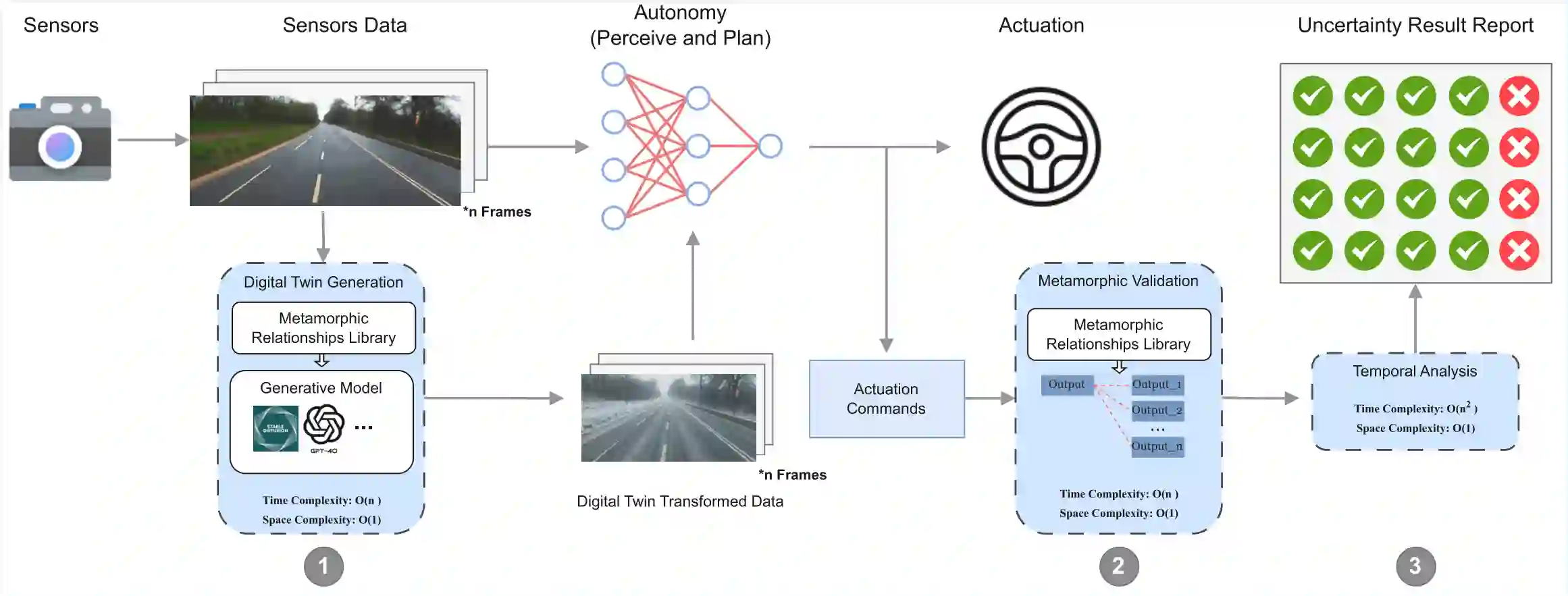
Ensuring the safety of self-driving cars remains a major challenge due to the complexity and unpredictability of real-world driving environments. Traditional testing methods face significant limitations, such as the oracle problem, which makes it difficult to determine whether a system's behavior is correct, and the inability to cover the full range of scenarios an autonomous vehicle may encounter. In this paper, we introduce a digital twin-driven metamorphic testing framework that addresses these challenges by creating a virtual replica of the self-driving system and its operating environment. By combining digital twin technology with AI-based image generative models such as Stable Diffusion, our approach enables the systematic generation of realistic and diverse driving scenes. This includes variations in weather, road topology, and environmental features, all while maintaining the core semantics of the original scenario. The digital twin provides a synchronized simulation environment where changes can be tested in a controlled and repeatable manner. Within this environment, we define three metamorphic relations inspired by real-world traffic rules and vehicle behavior. We validate our framework in the Udacity self-driving simulator and demonstrate that it significantly enhances test coverage and effectiveness. Our method achieves the highest true positive rate (0.719), F1 score (0.689), and precision (0.662) compared to baseline approaches. This paper highlights the value of integrating digital twins with AI-powered scenario generation to create a scalable, automated, and high-fidelity testing solution for autonomous vehicle safety.
翻译:确保自动驾驶汽车的安全仍然是一项重大挑战,这源于现实世界驾驶环境的复杂性和不可预测性。传统测试方法面临显著局限,例如预言问题(难以判定系统行为是否正确)以及无法覆盖自动驾驶车辆可能遇到的全部场景。本文提出一种数字孪生驱动的蜕变测试框架,通过创建自动驾驶系统及其运行环境的虚拟副本应对这些挑战。通过将数字孪生技术与基于AI的图像生成模型(如Stable Diffusion)相结合,我们的方法能够系统性地生成逼真且多样化的驾驶场景。这包括天气、道路拓扑和环境特征的多种变化,同时保持原始场景的核心语义。数字孪生提供了一个同步的仿真环境,可在其中以可控且可重复的方式测试变更。在此环境中,我们定义了三种受现实世界交通规则和车辆行为启发的蜕变关系。我们在Udacity自动驾驶仿真器中验证了该框架,并证明其显著提升了测试覆盖率和有效性。与基线方法相比,我们的方法实现了最高的真阳性率(0.719)、F1分数(0.689)和精确率(0.662)。本文强调了将数字孪生与AI驱动的场景生成相结合的价值,从而为自动驾驶车辆安全创建可扩展、自动化且高保真的测试解决方案。