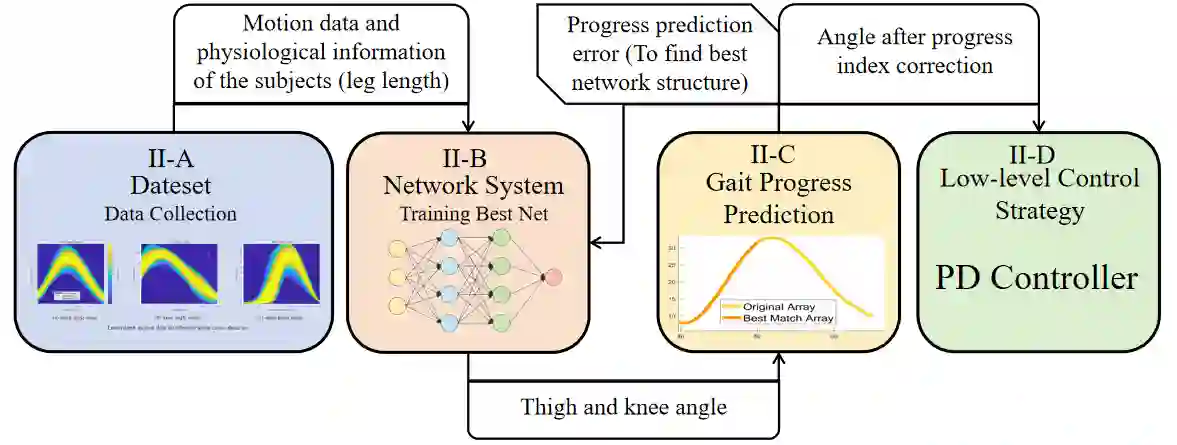
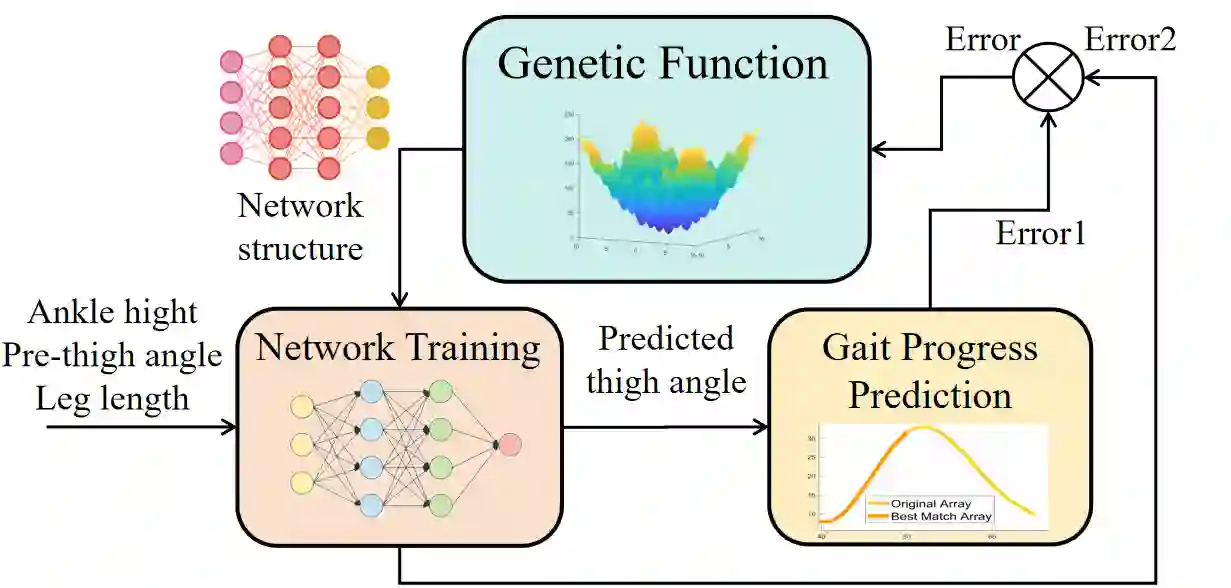
For amputees with powered transfemoral prosthetics, navigating obstacles or complex terrain remains challenging. This study addresses this issue by using an inertial sensor on the sound ankle to guide obstacle-crossing movements. A genetic algorithm computes the optimal neural network structure to predict the required angles of the thigh and knee joints. A gait progression prediction algorithm determines the actuation angle index for the prosthetic knee motor, ultimately defining the necessary thigh and knee angles and gait progression. Results show that when the standard deviation of Gaussian noise added to the thigh angle data is less than 1, the method can effectively eliminate noise interference, achieving 100\% accuracy in gait phase estimation under 150 Hz, with thigh angle prediction error being 8.71\% and knee angle prediction error being 6.78\%. These findings demonstrate the method's ability to accurately predict gait progression and joint angles, offering significant practical value for obstacle negotiation in powered transfemoral prosthetics.
翻译:对于配备动力型经股骨假肢的截肢者而言,跨越障碍物或复杂地形仍具挑战性。本研究通过利用健侧脚踝的惯性传感器引导越障动作来解决这一问题。遗传算法被用于计算最优神经网络结构,以预测所需的大腿和膝关节角度。步态进程预测算法确定假肢膝关节电机的驱动角度索引,最终定义所需的大腿与膝关节角度及步态进程。结果表明,当添加至大腿角度数据的高斯噪声标准差小于1时,该方法能有效消除噪声干扰,在150 Hz频率下实现步态相位估计100%的准确率,其中大腿角度预测误差为8.71%,膝关节角度预测误差为6.78%。这些发现证明该方法能精确预测步态进程与关节角度,为动力型经股骨假肢的越障应用提供了重要的实用价值。