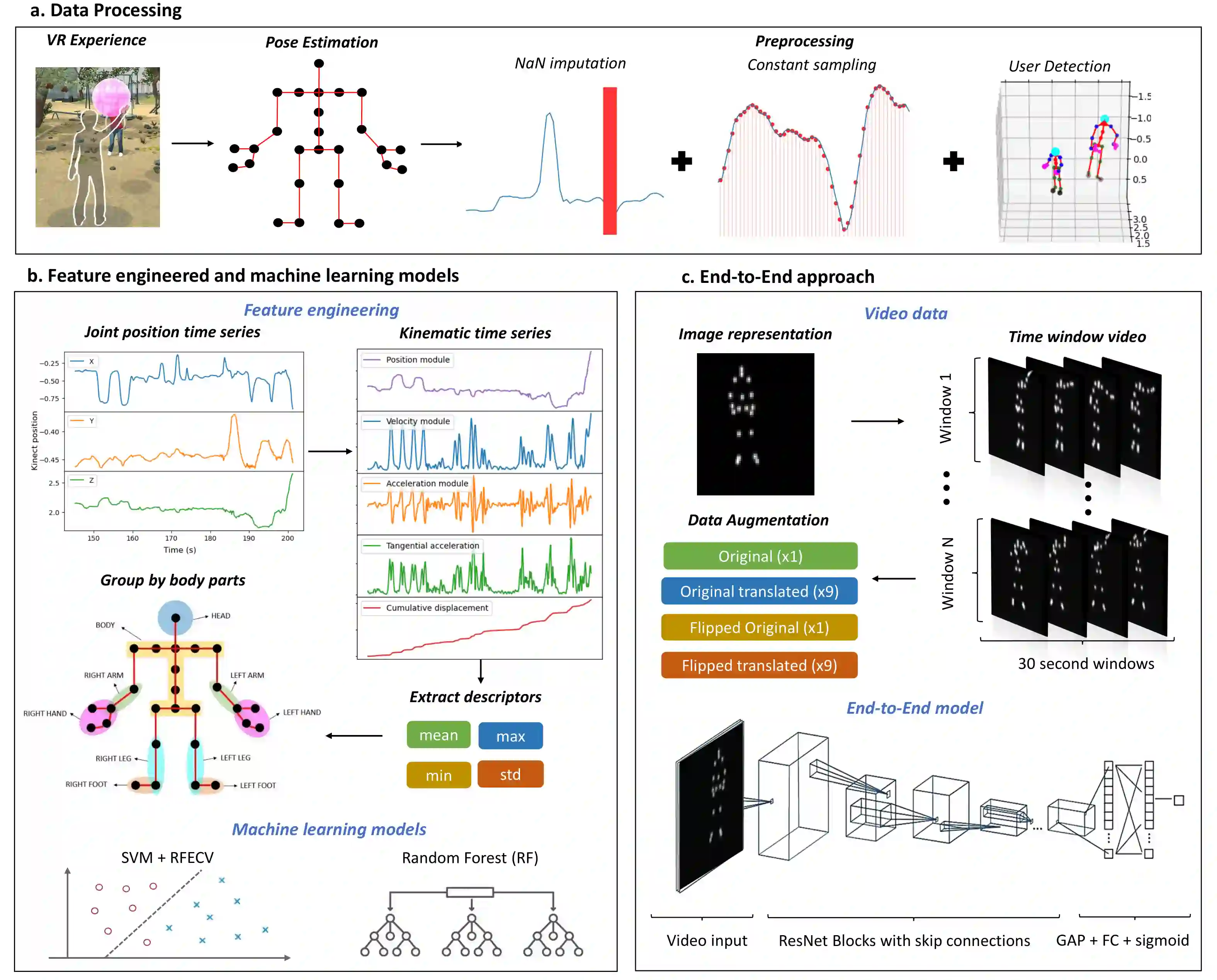
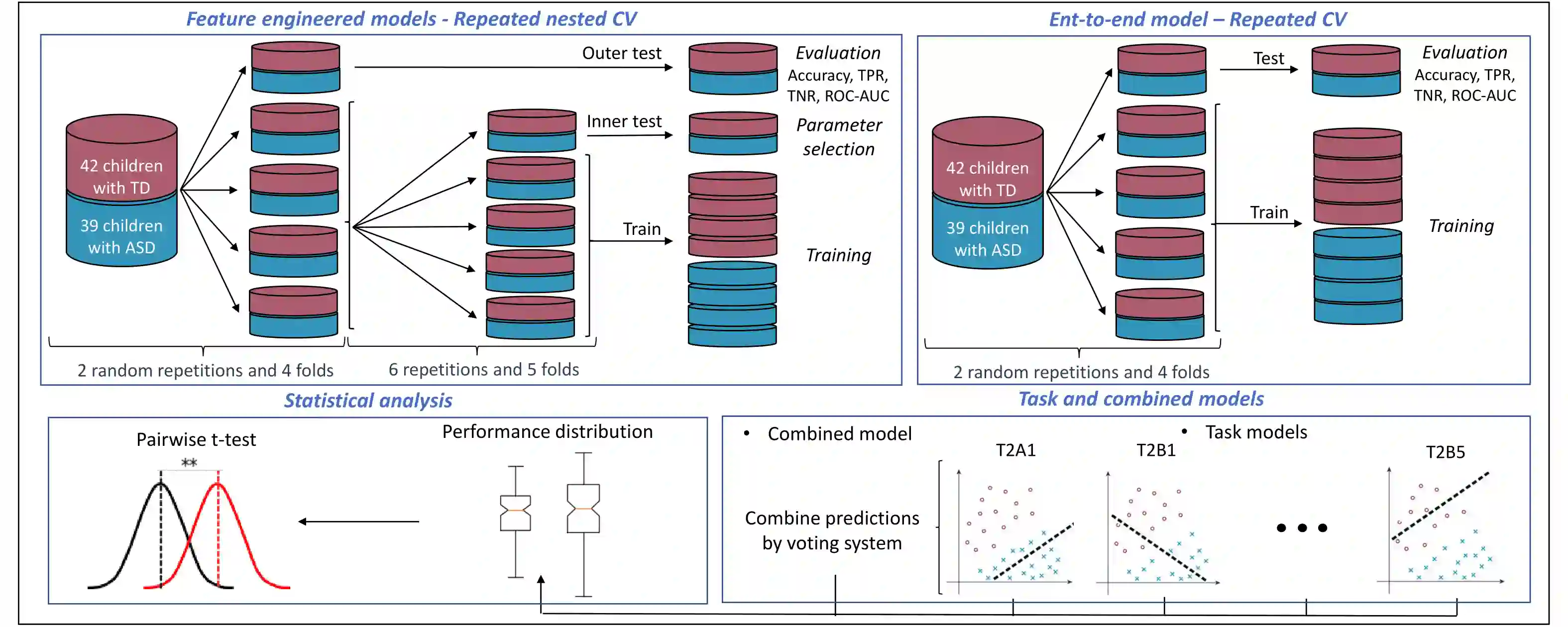
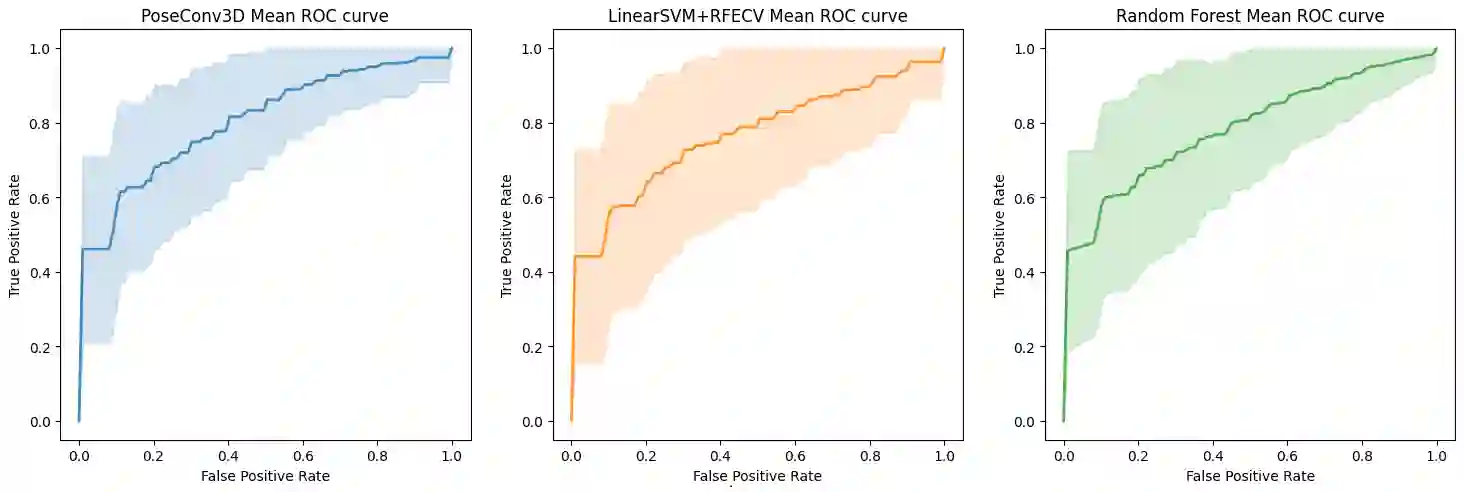
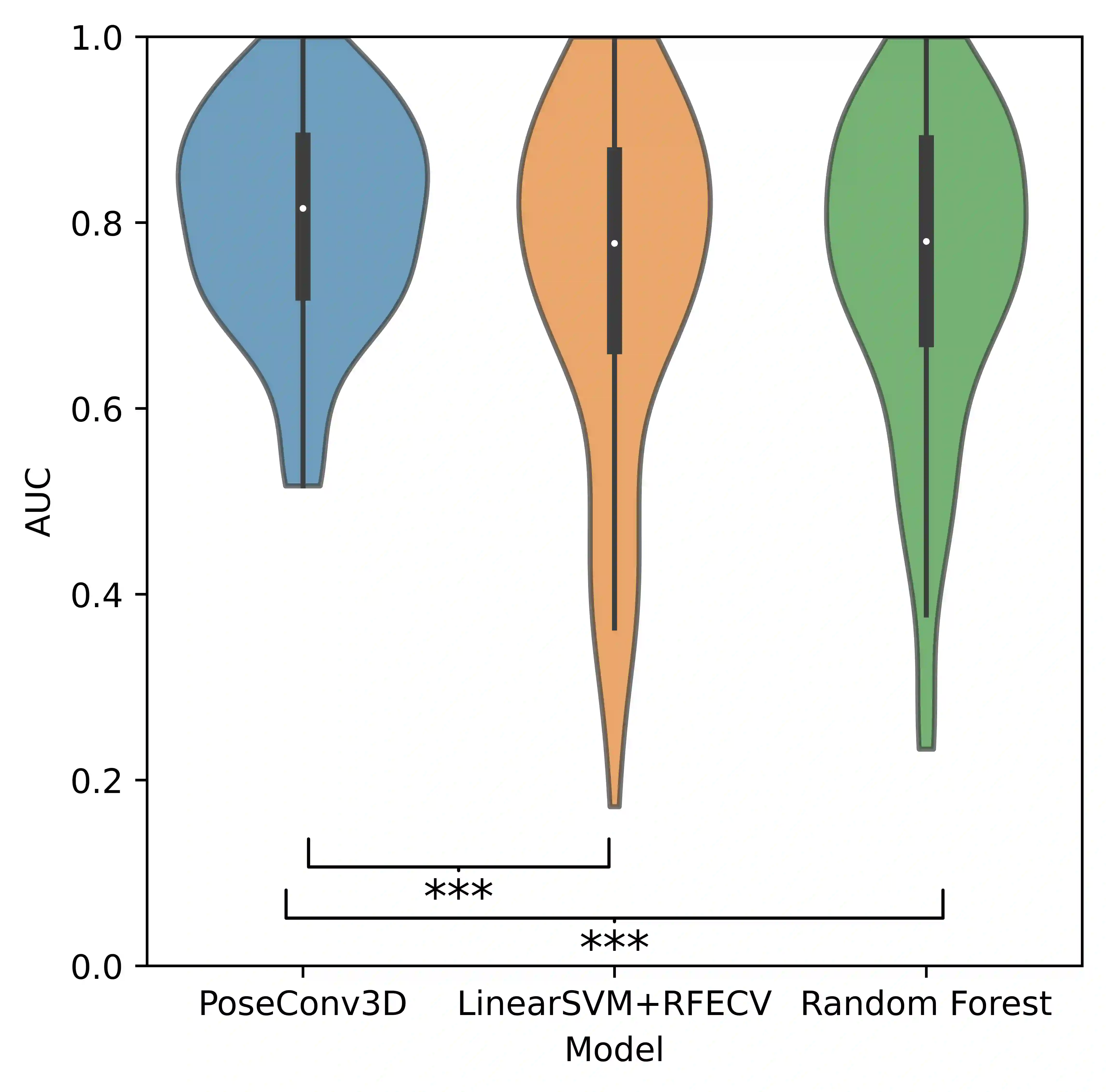
Autism Spectrum Disorder (ASD) is characterized by challenges in social communication and restricted patterns, with motor abnormalities gaining traction for early detection. However, kinematic analysis in ASD is limited, often lacking robust validation and relying on hand-crafted features for single tasks, leading to inconsistencies across studies. Thus, end-to-end models have become promising methods to overcome the need for feature engineering. Our aim is to assess both approaches across various kinematic tasks to measure the efficacy of commonly used features in ASD assessment, while comparing them to end-to-end models. Specifically, we developed a virtual reality environment with multiple motor tasks and trained models using both classification approaches. We prioritized a reliable validation framework with repeated cross-validation. Our comparative analysis revealed that hand-crafted features outperformed our deep learning approach in specific tasks, achieving a state-of-the-art area under the curve (AUC) of 0.90$\pm$0.06. Conversely, end-to-end models provided more consistent results with less variability across all VR tasks, demonstrating domain generalization and reliability, with a maximum task AUC of 0.89$\pm$0.06. These findings show that end-to-end models enable less variable and context-independent ASD assessments without requiring domain knowledge or task specificity. However, they also recognize the effectiveness of hand-crafted features in specific task scenarios.
翻译:自闭症谱系障碍(ASD)以社交沟通障碍和刻板行为模式为特征,其运动异常特征正逐渐成为早期检测的关注重点。然而,ASD的运动学分析仍存在局限性,常缺乏可靠的验证方法,且依赖针对单一任务的人工设计特征,导致不同研究结果之间存在不一致性。因此,端到端模型已成为克服特征工程需求的前景性方法。本研究旨在评估两种方法在不同运动学任务中的表现,检验ASD评估常用特征的有效性,并将其与端到端模型进行对比。具体而言,我们开发了包含多项运动任务的虚拟现实环境,并采用两种分类方法训练模型。研究优先采用基于重复交叉验证的可靠验证框架。比较分析显示,在特定任务中人工设计特征的表现优于深度学习方法,实现了0.90±0.06的曲线下面积(AUC)最新性能。相反,端到端模型在所有虚拟现实任务中展现出更稳定且变异性更小的结果,体现了领域泛化能力和可靠性,其最高任务AUC达0.89±0.06。这些发现表明,端到端模型无需领域知识或任务特异性即可实现低变异且情境独立的ASD评估,但同时也证实了人工设计特征在特定任务场景中的有效性。