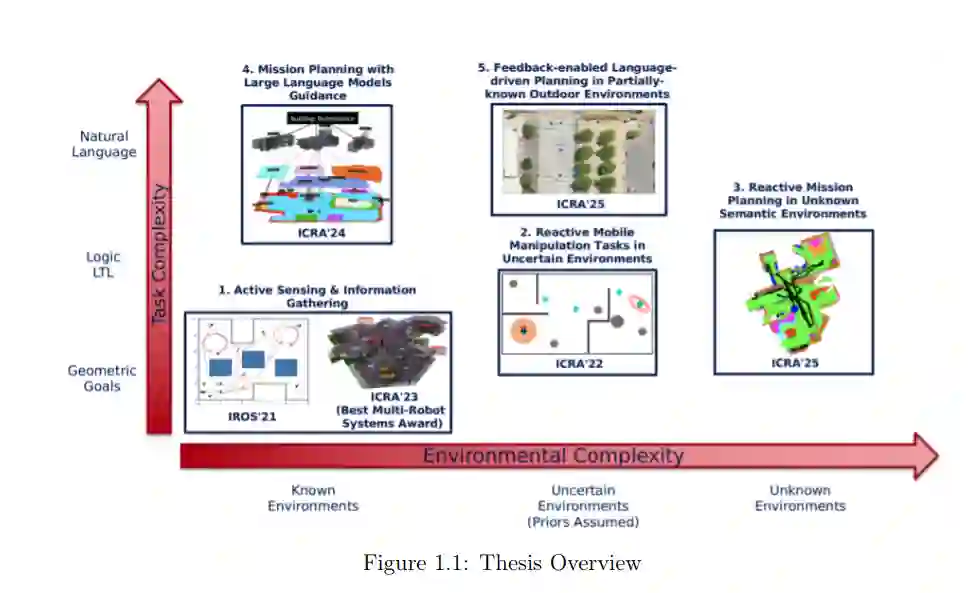
机器人学的最新进展已显著提升了机器人在多种任务规划中的能力,例如环境监测、结构检查和搜索救援。一个成功的范例是工业机器人,其被编程用于在可预测的结构化环境中执行装配操作。相比之下,在住宅等非结构化环境中,机器人常因未预料到的情况而面临困难,例如地图绘制不佳的区域或意外的人机交互,这凸显了当前技术在处理不确定性下任务规划方面的局限性。本论文通过探索不确定环境下移动任务规划的新方法,以应对这些挑战。
本文的第一部分介绍了一种方法,用于单个机器人完成任务:在不确定环境中导航的同时,重新排列一组位置先验未知的移动物体。机器人配备有噪声测距传感器和夹持器,任务以线性时序逻辑公式表达。在这一部分,我们引入了一种混合控制架构,以解决这些环境和感知不确定性下的任务规划问题。在特定假设下,该方法被证明是概率完备的。
接下来,问题的复杂性进一步增加,要求机器人在完全未知的环境中导航,并与那些其性质和位置均无先验知识的物体进行交互。本文提出了一种新颖的反应式任务规划方法,使机器人能够动态地构建对其周围环境的理解,同时调整其行为以适应意外情况,从而实现任务目标。
在下一章中,论文重点研究利用大语言模型来抽象化任务表达。本章通过允许以自然语言表达任务,使任务规约更加用户友好,并增强了机器人理解物体间语义关系的能力,从而在已知环境中实现更优、更快的任务规划解决方案。此外,该架构是首个为基于大语言模型的任务规划方法提供最优性和完备性保证的方法。
本文的最后一部分迈出了应对多机器人不确定性下任务规划的第一步。机器人在完全已知的环境中运行,但必须访问一组位置先验未知的几何目标点。该方法主要侧重于设计可扩展的多机器人主动信息采集方法。文中介绍了两种方法:一种是分布式的非短视采样方法,另一种是基于图神经网络的方法,使机器人能够在不确定环境中协作探索和收集信息。