
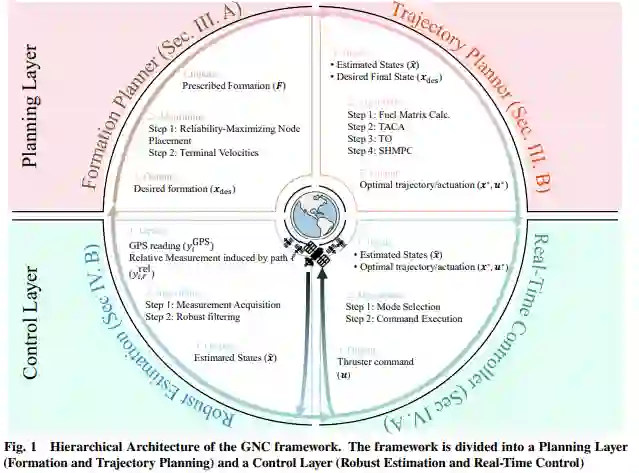
本研究考虑一个在低地球轨道运行、需在不确定性条件下安全高效重构的自主卫星集群。我们开发了一种控制架构,该架构设定期望的终端构型,并自主驱动集群在预定时间内从初始配置抵达该构型,同时满足可扩展性、安全性、燃料效率及对通信故障的韧性要求。所提出的分层方法将决策制定分离到不同时间尺度,并在可用卫星数量超过任务所需位置时,利用集群冗余来提升通信网络可靠性。该架构包含规划层与控制层。规划层包括:1. 一个网络可靠性最大化的构型规划器;2. 一个燃料最优且具备碰撞感知的轨迹规划器。控制层包括:1. 一个具备避障功能的实时轨迹跟踪控制器;2. 一个融合全球定位系统测量与星间测距数据的鲁棒估计器,以在传感器存在异常值时保持精确的状态估计。该框架假设卫星完全相同且具有轴解耦的平移驱动,姿态由独立的控制器稳定。该架构通过了高保真非线性仿真验证,轨迹规划器的硬件在环测试证明了其在飞行级别硬件上的计算可行性。
成为VIP会员查看完整内容
相关内容

最新内容
相关VIP内容
相关资讯