摘要—传统的即时定位与地图构建(SLAM)系统常受限于渲染质量粗糙、场景细节恢复不足以及在动态环境中的鲁棒性较差等问题。3D 高斯泼溅(3DGS)凭借其高效的显式表示和高质量渲染能力,为 SLAM 领域提供了一种全新的重建范式。本综述全面回顾了将 3DGS 与 SLAM 集成的关键技术路径。我们从四个核心维度——渲染质量、跟踪精度、重建速度和内存消耗——分析了代表性方法的性能优化手段,并深入探讨了其设计原理与技术突破。此外,我们考察了旨在增强 3DGS-SLAM 在运动模糊和动态环境等复杂场景下鲁棒性的相关方法。最后,本文讨论了该领域的未来挑战与发展趋势。本综述旨在为研究人员提供技术参考,并推动具有高保真、高效能和高鲁棒性特征的下一代 SLAM 系统的发展。
索引词—SLAM,3DGS,神经渲染,性能优化,动态场景。
I. 引言
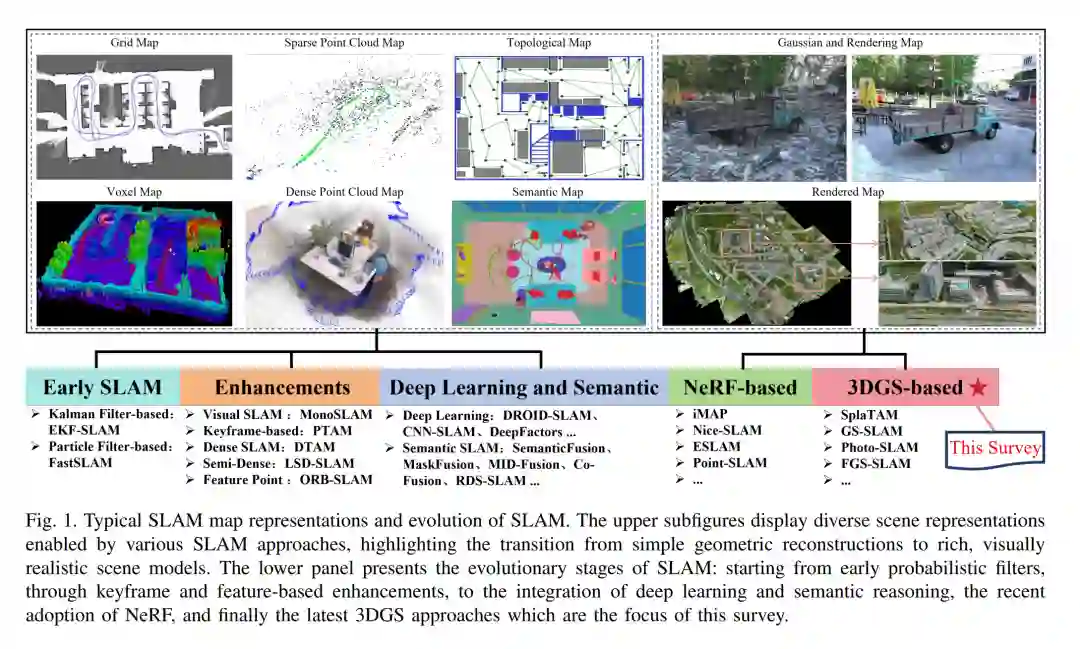
即时定位与地图构建(SLAM)是自动驾驶、增强现实及无人机导航等应用的基础技术,旨在未知环境中估计自身位姿,并同步构建一致的环境地图。SLAM 通过融合传感器数据提取环境特征,并基于运动与观测模型迭代优化位姿及地图。 传统 SLAM 方法主要依赖几何特征,其演进历程从滤波方法(如 EKF-SLAM [1])到稀疏特征点方法(如 MonoSLAM [2] 和 PTAM [3]),再到稠密/半稠密方法(如 DTAM [4] 和 LSD-SLAM [5]),最终发展为紧耦合架构(如 ORB-SLAM 系列 [6] 和 DSO [7])。其中,MonoSLAM 和 PTAM 开创了实时并行跟踪的先河;LSD-SLAM 和 DSO 等直接法提高了在弱纹理环境下的鲁棒性;而 ORB-SLAM 系列则通过整合闭环检测与严格的关键帧管理,确立了经典的基于图优化的范式。随着深度学习的发展,基于学习的方法(如 DROID-SLAM [8], DeepFactors [9] 和 SP-SLAM [10])显著提升了定位精度。此外,将语义信息引入建图的方法(如 MaskFusion [11], Co-Fusion [12] 和 RDS-SLAM [13])进一步增强了系统对环境的理解与建模能力 [14]。 尽管上述方法优势明显,但仍面临显著局限:在渲染质量方面,多数方法依赖粗糙的几何表示(如稀疏点云或网格),仅能恢复大致的场景几何,无法生成高保真视图;在跟踪精度方面,特征匹配在弱纹理、剧烈运动或光照变化下易失效,导致位姿漂移;此外,内存消耗仍是一大挑战,稠密方法存储网格或体素往往导致极高的内存占用。 近期,神经辐射场(NeRF)[15] 及其变体 [16]–[21] 推动了 SLAM 的显著进步。iMAP [22]、Nice-SLAM [23]、ESLAM [24] 和 Point-SLAM [25] 等系统将 NeRF 的高保真重建与 SLAM 的位姿优化结合,实现了可学习、可微且端到端的建图。iMAP 和 NICE-SLAM 等开创性工作展示了隐式场在连续重建中的潜力。随后,ESLAM 引入了轴对齐特征平面,Point-SLAM 引入了神经点云表示,进一步提升了效率。然而,基于 NeRF 的方法依赖密集视图采样,在稀疏视图下表现不佳,且神经网络训练计算开销巨大,难以满足实时性要求。这些方法通常使用大型体素哈希或多层感知机(MLP)表示场景,导致复杂度极高。 现有的 SLAM 范式在高保真重建与实时效率之间面临根本性的权衡。显式几何表示(如点云、体素、网格)利于实时运行,但往往难以捕捉高频纹理细节;相反,隐式神经表示虽擅长细节合成,但计算和内存成本极高,限制了其实时部署。新兴的 3D 高斯泼溅(3DGS)技术 [26] 弥补了这一差距,它提供了一种显式表示,兼具 NeRF 的渲染质量与卓越的渲染速度。尽管 3DGS 及其变体 [27]–[37] 在效率上显著优于 NeRF,但原始框架是为已知位姿的离线优化设计的,限制了其在在线场景中的直接应用。因此,研究人员开始将 3DGS 集成到 SLAM 流程中,将鲁棒的实时位姿估计与高质量场景重建相结合。这种协同效应确立了新一代视觉 SLAM,能够同时实现高保真和实时建图。图 1 展示了 SLAM 的发展历程。 自 3DGS 问世以来,已有数篇综述 [38]–[43] 对其进行了回顾,但多将其视为通用的场景表示,未探讨集成 SLAM 时的特定优化挑战。反之,现有的 SLAM 综述 [44]–[47] 未能涵盖 3DGS 在该领域的潜力。部分工作 [48]–[50] 尝试总结了 3DGS-SLAM 的进展,但通常基于传统 SLAM 维度(如传感器模态)进行分类,忽略了不同应用场景的核心需求。例如,沉浸式 AR/VR 要求虚拟叠加层与现实世界高度一致,追求极高的渲染质量;自主机器人 [51] 和无人机导航 [52] 为确保安全需稳定的位姿估计,侧重跟踪精度;自动驾驶 [53] 和交互式数字孪生依赖低延迟,需优化速度;而大规模建图必须处理海量数据,凸显了内存优化的重要性。 基于此视角,本综述聚焦于 3DGS-SLAM 的优化策略。我们系统考察了在渲染质量、跟踪精度、重建速度及内存消耗四个关键性能维度的核心技术与代表性工作。此外,我们还讨论了处理运动模糊和动态场景的增强鲁棒性方法。图 2 概述了本文的结构。我们的目标是提供全面的参考,并推动具备高保真、高效能、高鲁棒性特征的下一代 SLAM 的发展。