
近年来,自主技术发展迅速,智能系统在感知、决策和适应性行为方面展现出日益复杂的能力。这些进展使自主智能体能够成为队友,促进在多个领域与人类协作,并催生了“人-自主系统编队(HAT)”系统的出现。HAT系统越来越多地涉及在动态、高风险环境中与人类协同工作的多个自主智能体。HAT系统通常采用静态的层级结构进行工程化设计,这些结构为一组任务预定义了领导权限,从而限制了其应对不断变化的情境需求或意外条件的适应性,导致协作和任务性能非预期地下降。对于动态环境,HAT系统需要在智能体之间具备灵活或涌现的领导结构。
本文研究共享领导力,以实现人类与自主智能体之间灵活的权限分配,从而增强由人类和自主智能体组成的多智能体系统中的协作与性能。本研究的目标是:(1)理解人类团队中的共享领导力机制如何适用于多智能体HAT系统;(2)从人类视角对领导力涌现进行建模,并识别支配其时间模式的因素;(3)比较共享领导力与集中式领导力在性能和团队动态感知方面的差异。
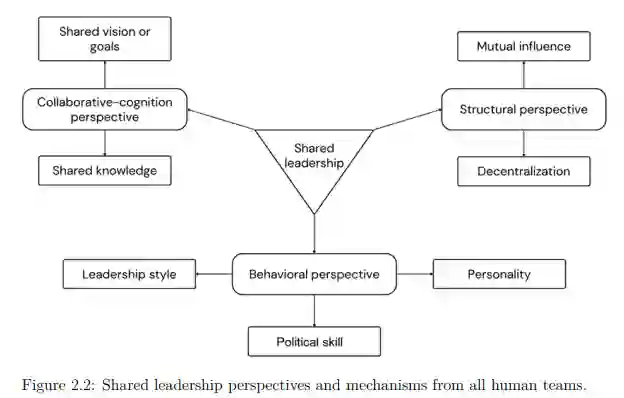
研究1是对人类团队中共享领导力的系统性文献综述,旨在推导可被工程化到HAT中的机制。综述揭示,人类依赖于人际信任和基于绩效的能力评估来进行领导力分配,其中分权和相互影响是促成共享领导力的最主要机制。综述还确定基于问卷的评估和网络分析是可行的测量方法,后者同时也是在HAT中实现共享领导力的可行途径。这些发现为在HAT中实施和评估共享领导力奠定了理论和方法学基础。
研究2是一项实验,招募人类参与者完成一系列物体识别任务,任务涉及在模拟搜救场景中分配多个无人机的任务。利用网络分析对实验数据建模,特别是分析人类对自主系统的信任-能力感知如何随时间演变,揭示了领导力分配的时间模式。该研究包含了“信任-能力-身份网络”,该网络旨在捕捉人类在重复任务迭代中对智能体的感知。群体层面的逻辑回归表明,能力是作为基于能力的预测因子,而个体层面的时间指数随机图模型则表明,信任是作为预测领导力分配的个体化经验驱动因子。这些结果为TCIN在预测HAT中领导力涌现提供了基础证据,说明了人类选择自主智能体作为领导者时关键因素的共变关系。
研究3是另一项实验,招募人类参与者完成一系列物体识别任务,其中包含了传统的集中式领导力和共享领导力两种条件,以比较多智能体HAT中的性能。研究3还包含了一份新开发的适用于HAT的共享领导力量表,该量表改编自人类团队中经过验证的测量工具,用于衡量HAT中的领导力动态。与集中式领导力相比,共享领导力展现出更优越的性能,这表明在人类和自主智能体之间分配权限比集中权限能产生更好的结果。群体层面的逻辑回归表明,信任调节了互补性“主张-授予”行为增加的速率,而个体层面的时间指数随机图模型表明,参与者最终采用了互补性模式。共享领导力量表也揭示,与集中式领导力条件相比,参与者在共享领导力条件下感知到更多的领导力分布、团队协作和对专业知识的尊重。这些发现表明,HAT中的共享领导力既涉及时间性学习过程,也涉及对超越智能体评估个体差异的功能性益处的认知,从而确立了共享领导力作为多智能体团队一种可行的组织结构。
本文的其余部分在不同的章节中分别描述了这三项研究,随后详细讨论了它们的贡献。第2章呈现了第一项研究,详述了关于共享领导力的系统性文献综述,论证了共享领导力对该领域做出重要贡献的潜力。第3章呈现了第二项研究,即在HAT情境下,结合对自主系统的信任与能力感知,对领导力涌现进行建模。第4章呈现了第三项研究,该研究在HAT中比较了共享领导力与集中式领导力。第5章综合讨论了这三项研究的贡献。第6章通过总结主要发现来结束本论文。

