
防空系统已从以平台为中心的高射炮配置,深刻转型为分布式、传感器融合赋能的防御生态系统,能够在充满对抗的电磁环境中对抗飞机、弹道导弹、巡航导弹、无人机(UAVs)及巡飞弹药。本文对现代防空架构进行了全面的技术综述,审视了监视传感器网络、火控与跟踪系统、指挥控制框架、拦截器制导策略、基于火炮的短程防空平台、定向能(DE)拦截技术以及基于比例导引的交战建模。重点聚焦于基础设施有限战区的作战需求——在这些区域,稀疏的雷达覆盖、受限的电力供应、脆弱的通信网络以及分散的被保护资产,要求采用自适应、模块化的防御解决方案。本综述整合了控制雷达探测性能的分析公式、基于卡尔曼滤波的轨迹估计、比例导引拦截以及分布式传感器融合概率建模,从而建立起关于分层防空性能的严谨系统工程视角。新兴技术方向——包括人工智能赋能的交战优先级排序、全球导航卫星系统拒止环境下的导航架构、无源传感网络、网状网络通信框架以及高能激光拦截系统——均在反无人机防御和远征防护行动的背景下得到评估。特别关注民用基础设施、人道主义物流走廊、前方作战基地及能源设施的保护,这些目标在撒哈拉以南非洲及类似的作战环境中日益暴露于非对称空中威胁之下。本文进一步识别了影响发展中防御生态系统的关键能力缺口,包括雷达覆盖不连续、拦截器成本约束、通信脆弱性以及有限的本地集成能力。基于这些发现,本研究为模块化分布式防空系统架构奠定了技术基础,该架构针对资源受限战区内的可扩展部署进行了优化。该框架支持具有生存能力、成本效益且有人监督的分层拦截能力,既适用于军事力量保护,也适用于民用基础设施安全任务。
关键词:一体化防空系统(IADS);分布式传感器融合;反无人机防御;短程防空;比例导引制导;定向能系统;全球导航卫星系统拒止环境下的作战;基础设施有限战区;民用基础设施保护。

图1:防空系统从光学高射炮网络到雷达制导导弹系统、一体化防空架构以及适用于基础设施有限作战环境的分布式反无人机传感器融合保护框架的演进。
面向分布式探测网络的多传感器融合架构
现代防空系统日益依赖多传感器融合框架,以提高复杂电磁环境和低空威胁环境下的探测可靠性并降低虚警率。传感器融合将来自雷达监视节点、无源射频传感器、光电/红外跟踪系统以及声学阵列的异构观测数据整合到统一的威胁识别流水线中,从而支持实时交战决策。如图2所示,分布式传感节点协同工作,在基础设施有限战区内提供覆盖短程、中程和远程监视区域的分层探测能力。
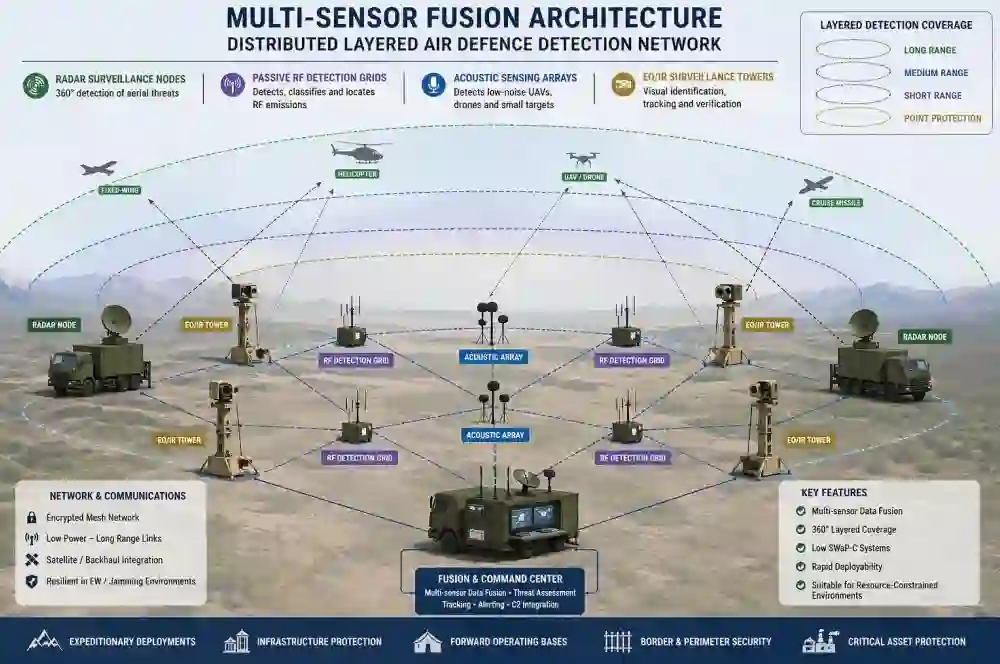
图2:结合雷达监视节点、无源射频探测网格、声学传感阵列和光电/红外监视塔的多传感器融合架构,构成适用于资源受限环境下远征部署和基础设施保护行动的分布式分层防空探测网络。
火控与目标跟踪系统
火控与目标跟踪子系统构成了现代防空架构的计算核心,通过精确估计目标轨迹并支持及时的拦截器制导决策来发挥作用。当代系统依赖于递归状态估计算法、自适应跟踪雷达以及多目标交战调度框架,以维持针对在异质环境中机动飞行的空中威胁的拦截有效性。在分布式作战环境中,特别是在那些以间歇性通信基础设施和有限雷达覆盖连续性为特征的作战环境中,稳健的跟踪架构必须在不完整的观测数据、延迟的传感器更新以及退化的导航基准条件下可靠运行。
