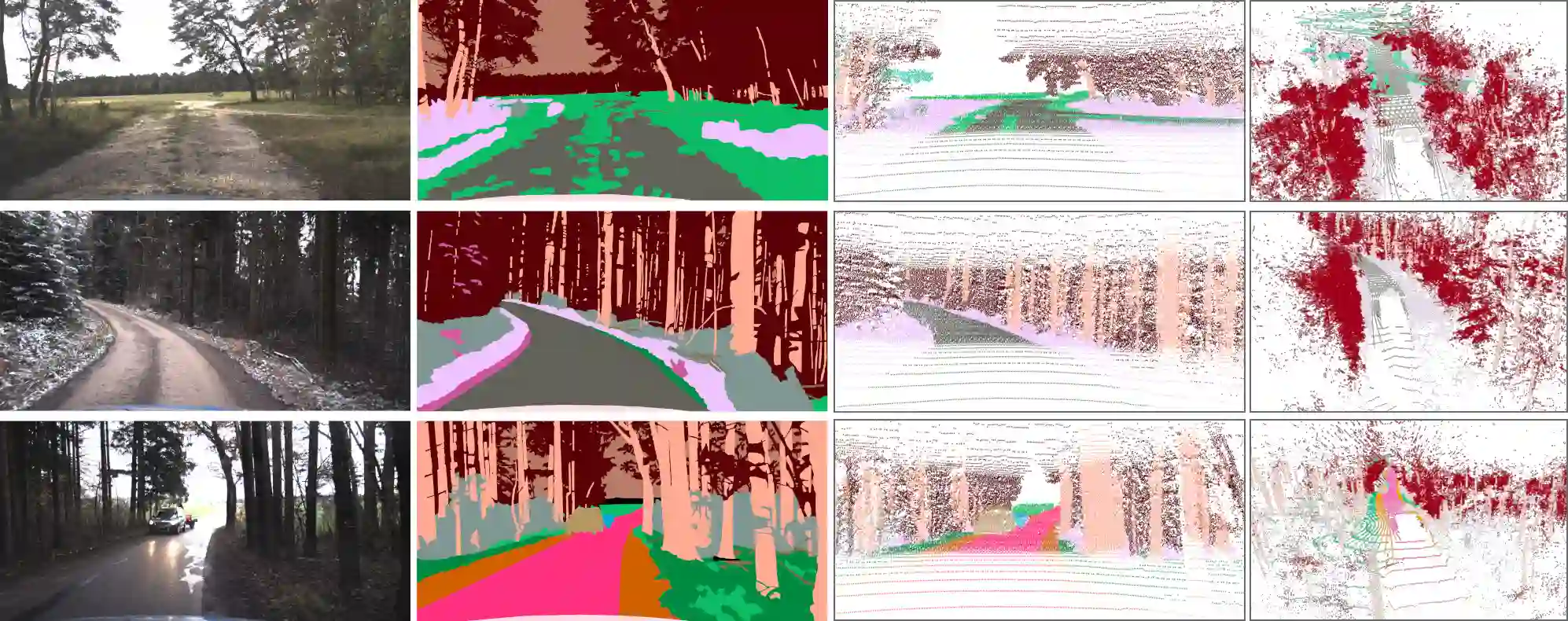
The potential for deploying autonomous systems can be significantly increased by improving the perception and interpretation of the environment. However, the development of deep learning-based techniques for autonomous systems in unstructured outdoor environments poses challenges due to limited data availability for training and testing. To address this gap, we present the German Outdoor and Offroad Dataset (GOOSE), a comprehensive dataset specifically designed for unstructured outdoor environments. The GOOSE dataset incorporates 10 000 labeled pairs of images and point clouds, which are utilized to train a range of state-of-the-art segmentation models on both image and point cloud data. We open source the dataset, along with an ontology for unstructured terrain, as well as dataset standards and guidelines. This initiative aims to establish a common framework, enabling the seamless inclusion of existing datasets and a fast way to enhance the perception capabilities of various robots operating in unstructured environments. The dataset, pre-trained models for offroad perception, and additional documentation can be found at https://goose-dataset.de/.
翻译:提升环境感知与解读能力可显著增强自主系统的部署潜力。然而,在非结构化户外环境中开发基于深度学习的自主系统技术,因训练与测试数据有限而面临诸多挑战。为弥补这一空白,我们提出了德国户外与越野数据集(GOOSE)——一个专为非结构化户外环境设计的综合性数据集。GOOSE数据集包含10,000组标注的图像与点云配对数据,用于在图像与点云数据上训练一系列先进的语义分割模型。我们开源了该数据集及其对应的非结构化地形本体论,同时提供了数据集标准与使用指南。此项工作旨在建立公共框架,支持现有数据集的便捷整合,并快速提升各类机器人在非结构化环境中的感知能力。数据集、面向越野场景的预训练模型及相关文档可访问https://goose-dataset.de/获取。