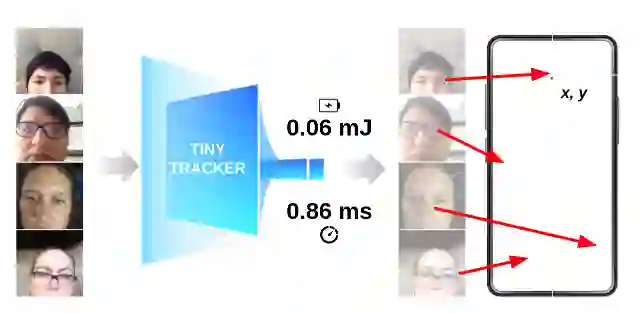
Intelligent edge vision tasks encounter the critical challenge of ensuring power and latency efficiency due to the typically heavy computational load they impose on edge platforms.This work leverages one of the first "AI in sensor" vision platforms, IMX500 by Sony, to achieve ultra-fast and ultra-low-power end-to-end edge vision applications. We evaluate the IMX500 and compare it to other edge platforms, such as the Google Coral Dev Micro and Sony Spresense, by exploring gaze estimation as a case study. We propose TinyTracker, a highly efficient, fully quantized model for 2D gaze estimation designed to maximize the performance of the edge vision systems considered in this study. TinyTracker achieves a 41x size reduction (600Kb) compared to iTracker [1] without significant loss in gaze estimation accuracy (maximum of 0.16 cm when fully quantized). TinyTracker's deployment on the Sony IMX500 vision sensor results in end-to-end latency of around 19ms. The camera takes around 17.9ms to read, process and transmit the pixels to the accelerator. The inference time of the network is 0.86ms with an additional 0.24 ms for retrieving the results from the sensor. The overall energy consumption of the end-to-end system is 4.9 mJ, including 0.06 mJ for inference. The end-to-end study shows that IMX500 is 1.7x faster than CoralMicro (19ms vs 34.4ms) and 7x more power efficient (4.9mJ VS 34.2mJ)
翻译:边缘智能视觉任务面临的关键挑战在于,它们对边缘平台施加的通常较重计算负载,导致难以保证功耗和延迟效率。本研究利用索尼公司的IMX500这一首批"人工智能传感器内"视觉平台之一,实现超快、超低功耗的端到端边缘视觉应用。我们以视线估计为案例,评估了IMX500并将其与其他边缘平台(如Google Coral Dev Micro和Sony Spresense)进行了比较。我们提出了TinyTracker,一种用于二维视线估计的高效全量化模型,旨在最大化本研究中所考虑边缘视觉系统的性能。与iTracker [1]相比,TinyTracker实现了41倍的尺寸缩减(600Kb),且视线估计精度无显著损失(全量化时最大误差为0.16厘米)。TinyTracker部署在索尼IMX500视觉传感器上,端到端延迟约为19毫秒。摄像头读取、处理并将像素传输至加速器大约需要17.9毫秒。网络推理时间为0.86毫秒,额外需要0.24毫秒从传感器中检索结果。整个端到端系统的总能耗为4.9 mJ,其中推理部分仅占0.06 mJ。端到端研究表明,IMX500比CoralMicro快1.7倍(19毫秒对比34.4毫秒),能效高7倍(4.9 mJ对比34.2 mJ)。