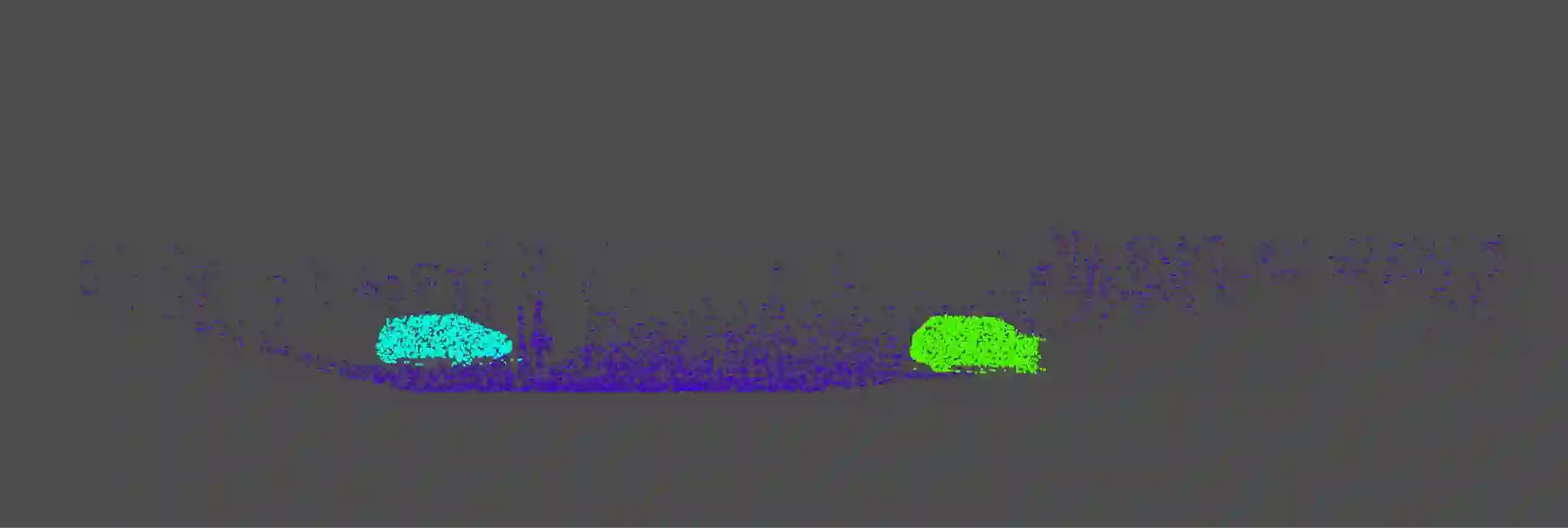
We investigate a variation of the 3D registration problem, named multi-model 3D registration. In the multi-model registration problem, we are given two point clouds picturing a set of objects at different poses (and possibly including points belonging to the background) and we want to simultaneously reconstruct how all objects moved between the two point clouds. This setup generalizes standard 3D registration where one wants to reconstruct a single pose, e.g., the motion of the sensor picturing a static scene. Moreover, it provides a mathematically grounded formulation for relevant robotics applications, e.g., where a depth sensor onboard a robot perceives a dynamic scene and has the goal of estimating its own motion (from the static portion of the scene) while simultaneously recovering the motion of all dynamic objects. We assume a correspondence-based setup where we have putative matches between the two point clouds and consider the practical case where these correspondences are plagued with outliers. We then propose a simple approach based on Expectation-Maximization (EM) and establish theoretical conditions under which the EM approach converges to the ground truth. We evaluate the approach in simulated and real datasets ranging from table-top scenes to self-driving scenarios and demonstrate its effectiveness when combined with state-of-the-art scene flow methods to establish dense correspondences.
翻译:我们研究了一种三维配准问题的变体,称为多模型三维配准。在多模型配准问题中,给定两个点云,它们描绘了处于不同姿态下的多个物体(可能包含属于背景的点),我们希望同时重建所有物体在这两个点云之间的运动方式。该设置推广了标准三维配准——后者仅需重建单一姿态(例如,描绘静态场景的传感器自身的运动)。此外,它为相关机器人应用提供了数学上严谨的公式化描述,例如:搭载深度传感器的机器人在感知动态场景时,需从场景的静态部分估计自身运动,同时恢复所有动态物体的运动。我们假设基于对应点的设置,即拥有两个点云之间的假设匹配,并考虑这些对应点包含大量外点的实际情形。随后,我们提出一种基于期望最大化(EM)的简单方法,并建立了EM方法收敛于真实值的理论条件。我们在从桌面场景到自动驾驶场景的模拟和真实数据集上评估了该方法,并展示了其与前沿场景流方法结合以建立稠密对应点时的有效性。