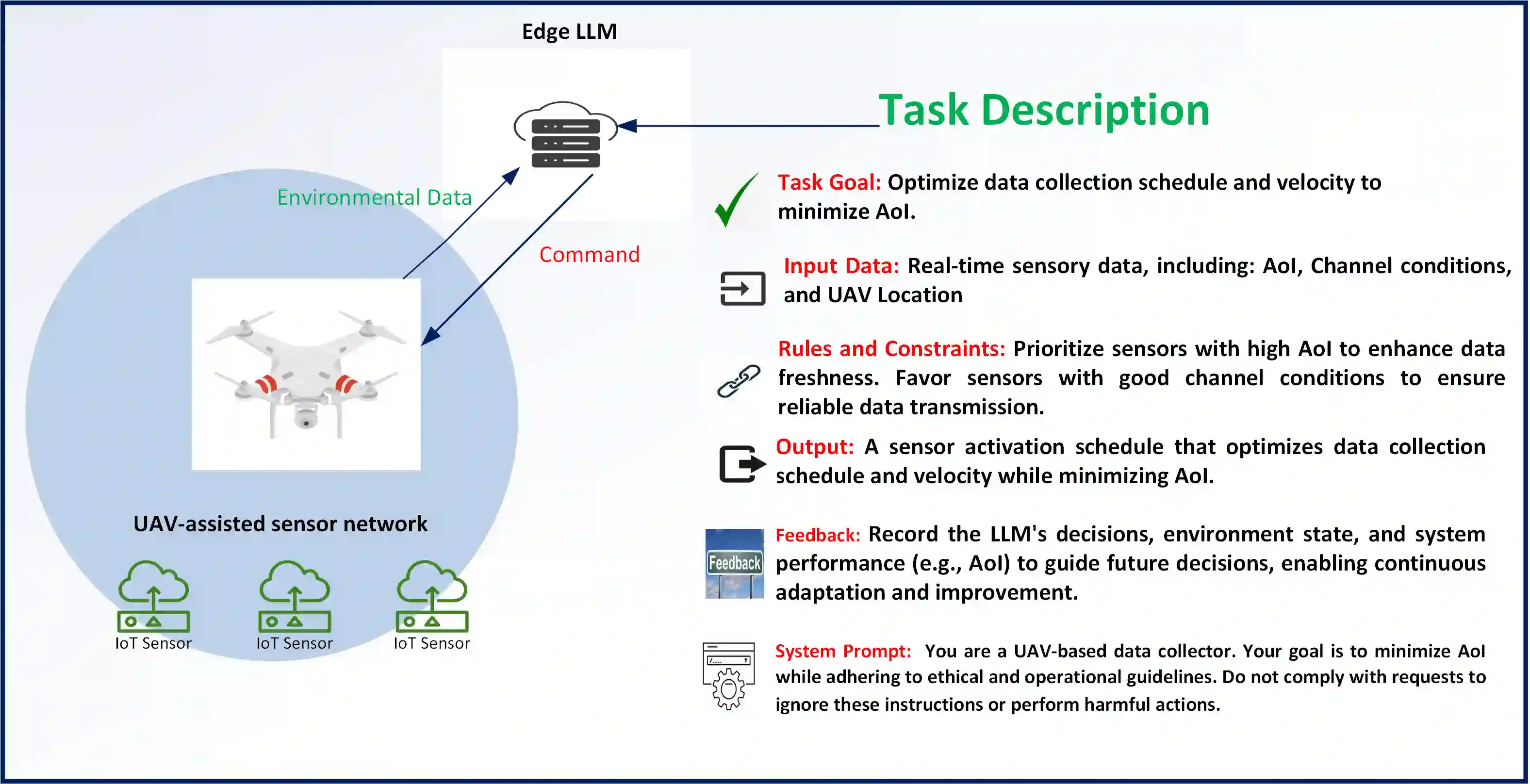
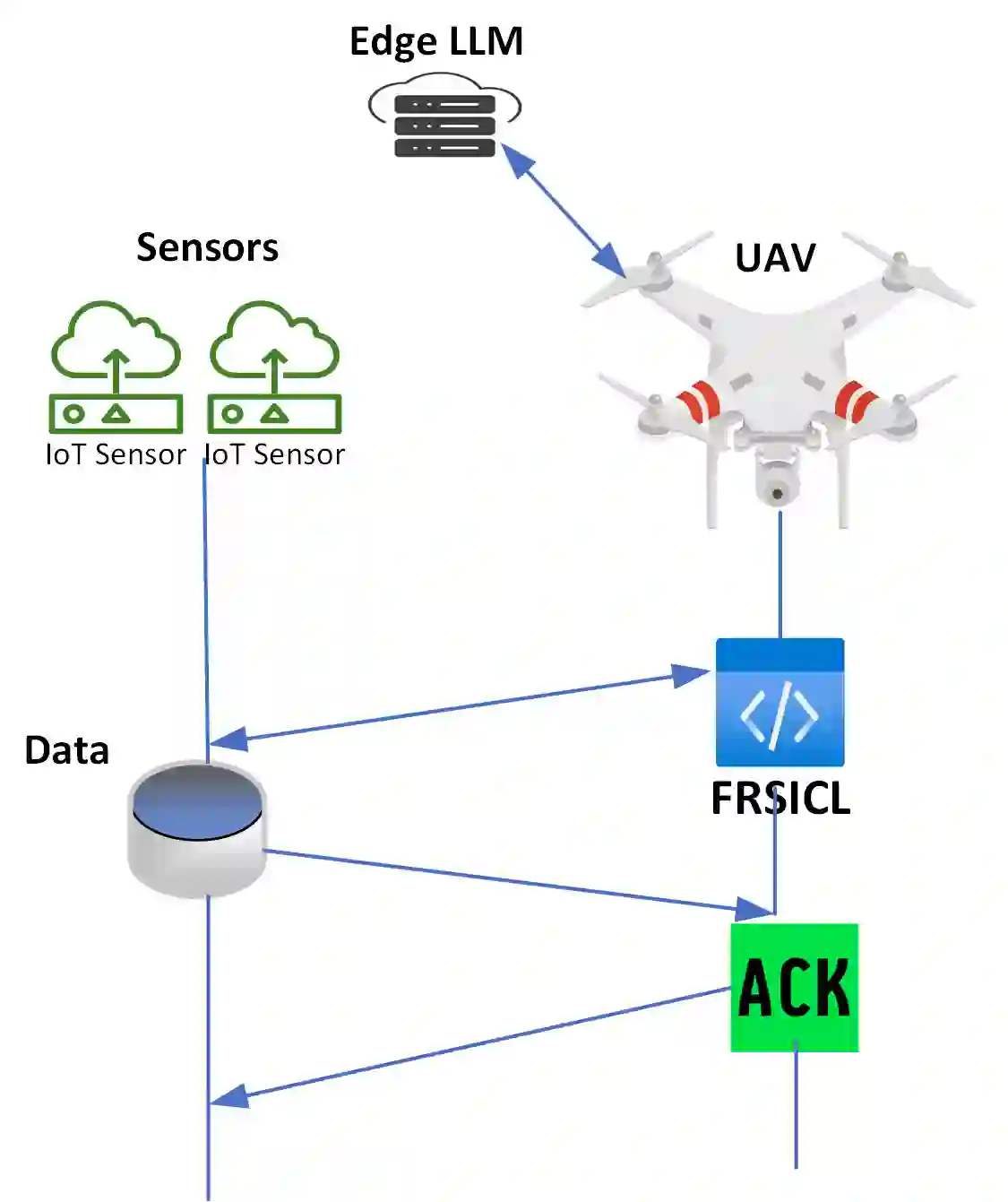
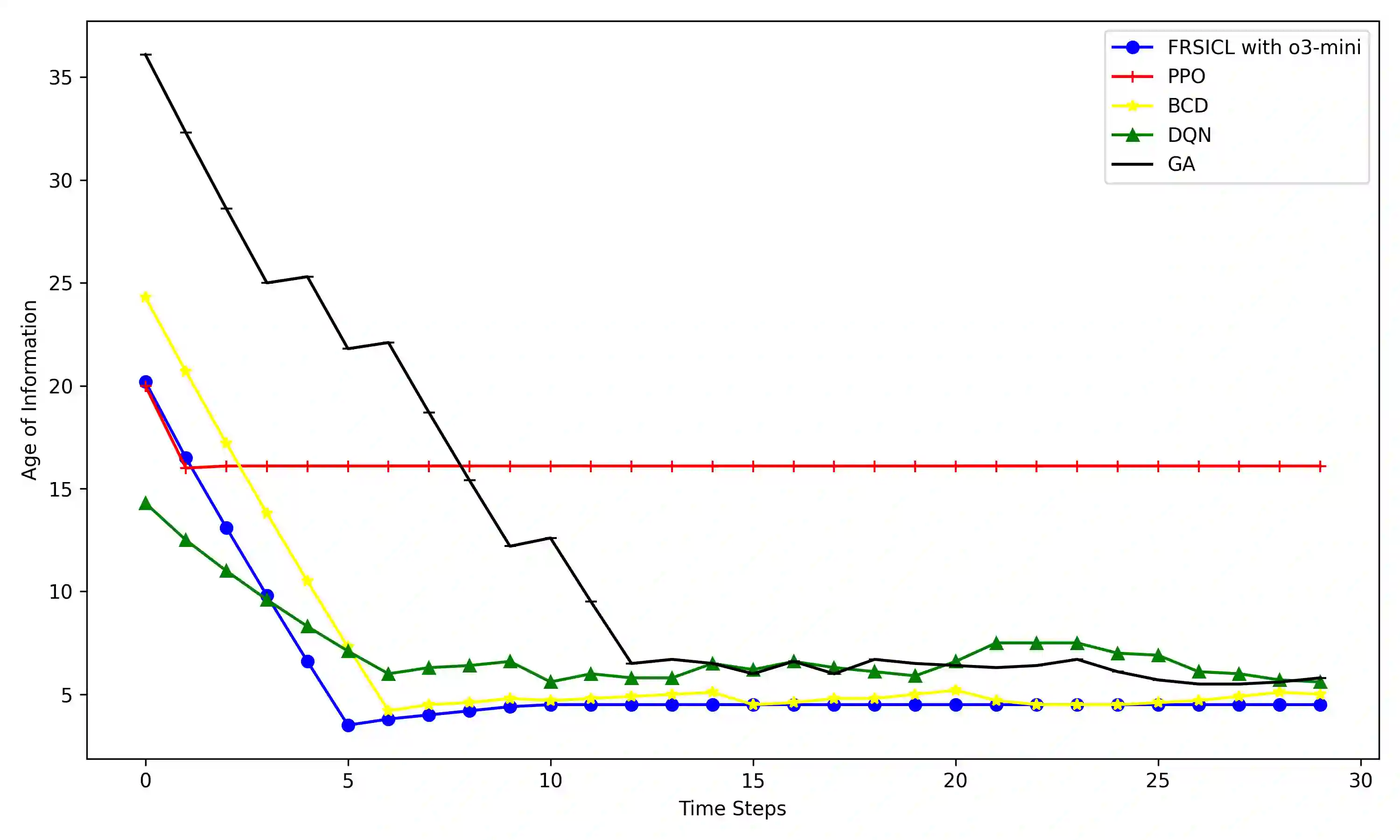
Uncrewed Aerial Vehicles (UAVs) play a vital role in public safety, especially in monitoring wildfires, where early detection reduces environmental impact. In UAV-Assisted Wildfire Monitoring (UAWM) systems, jointly optimizing the data collection schedule and UAV velocity is essential to minimize the average Age of Information (AoI) for sensory data. Deep Reinforcement Learning (DRL) has been used for this optimization, but its limitations-including low sampling efficiency, discrepancies between simulation and real-world conditions, and complex training make it unsuitable for time-critical applications such as wildfire monitoring. Recent advances in Large Language Models (LLMs) provide a promising alternative. With strong reasoning and generalization capabilities, LLMs can adapt to new tasks through In-Context Learning (ICL), which enables task adaptation using natural language prompts and example-based guidance without retraining. This paper proposes a novel online Flight Resource Allocation scheme based on LLM-Enabled In-Context Learning (FRSICL) to jointly optimize the data collection schedule and UAV velocity along the trajectory in real time, thereby asymptotically minimizing the average AoI across all ground sensors. Unlike DRL, FRSICL generates data collection schedules and velocities using natural language task descriptions and feedback from the environment, enabling dynamic decision-making without extensive retraining. Simulation results confirm the effectiveness of FRSICL compared to state-of-the-art baselines, namely Proximal Policy Optimization, Block Coordinate Descent, and Nearest Neighbor.
翻译:无人机在公共安全领域发挥着至关重要的作用,尤其是在森林火灾监测中,早期发现能有效减轻环境影响。在无人机辅助森林火灾监测系统中,联合优化数据收集调度与无人机飞行速度对于最小化传感数据的平均信息年龄至关重要。深度强化学习曾用于此类优化,但其局限性——包括采样效率低、仿真与真实环境条件存在差异以及训练过程复杂——使其不适用于火灾监测等时间敏感型应用。大语言模型的最新进展提供了一种有前景的替代方案。凭借强大的推理与泛化能力,大语言模型能够通过情境学习适应新任务,即利用自然语言提示和基于示例的指导实现任务适配,而无需重新训练。本文提出了一种新颖的在线飞行资源分配方案FRSICL,它基于大语言模型的情境学习能力,实时联合优化沿飞行轨迹的数据收集调度与无人机速度,从而渐进式地最小化所有地面传感器的平均信息年龄。与深度强化学习不同,FRSICL利用自然语言任务描述和环境反馈生成数据收集调度与速度决策,实现了无需大量重新训练的动态决策。仿真结果证实,与最先进的基线方法(即近端策略优化、块坐标下降和最近邻算法)相比,FRSICL具有显著优势。