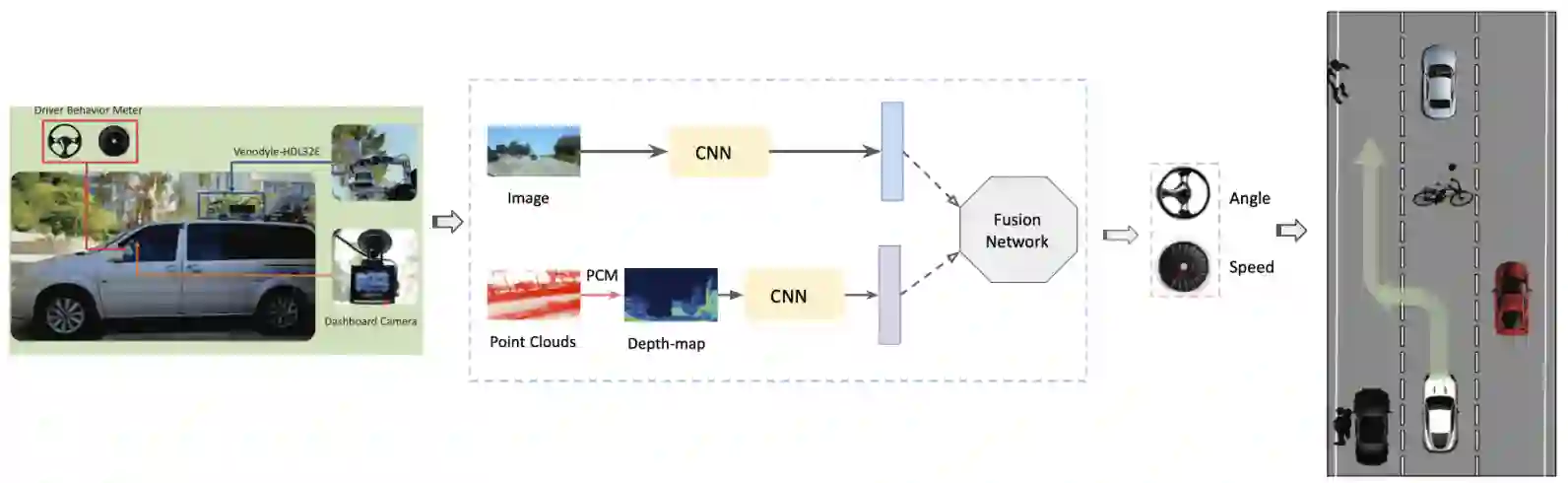
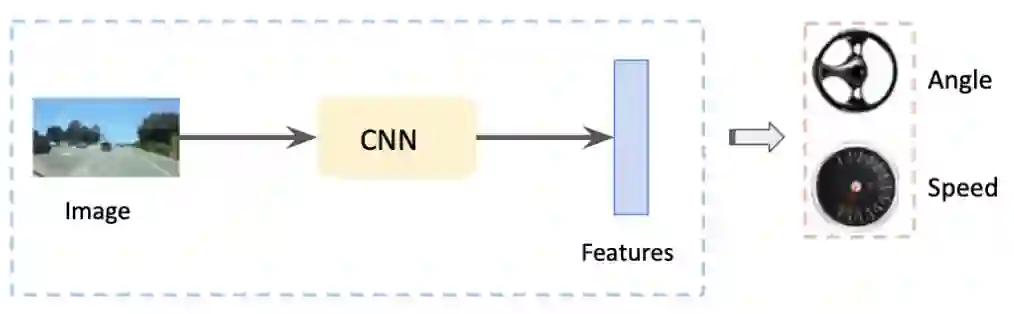
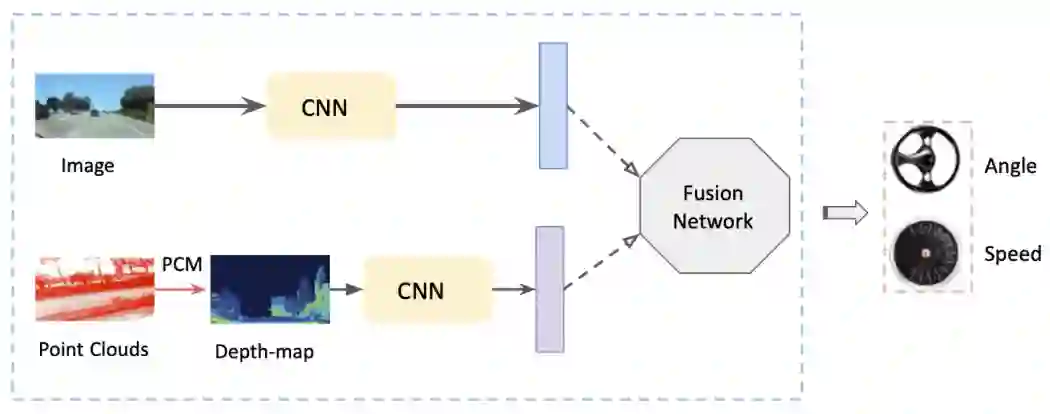
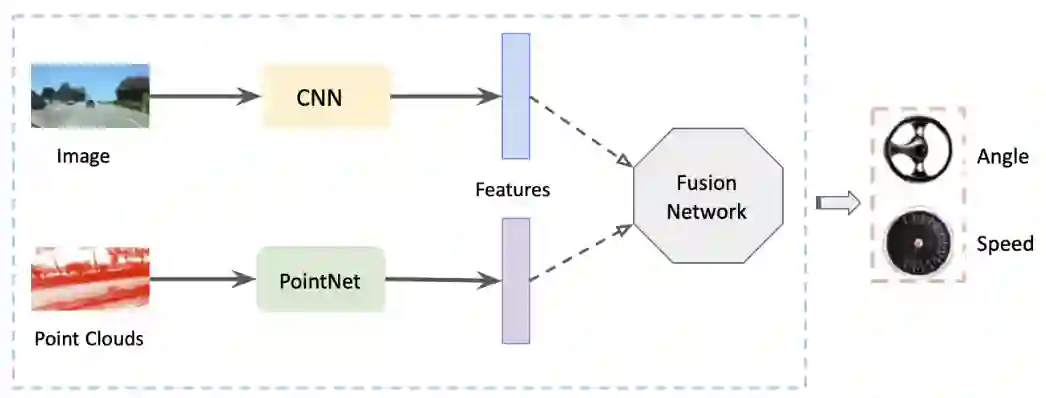
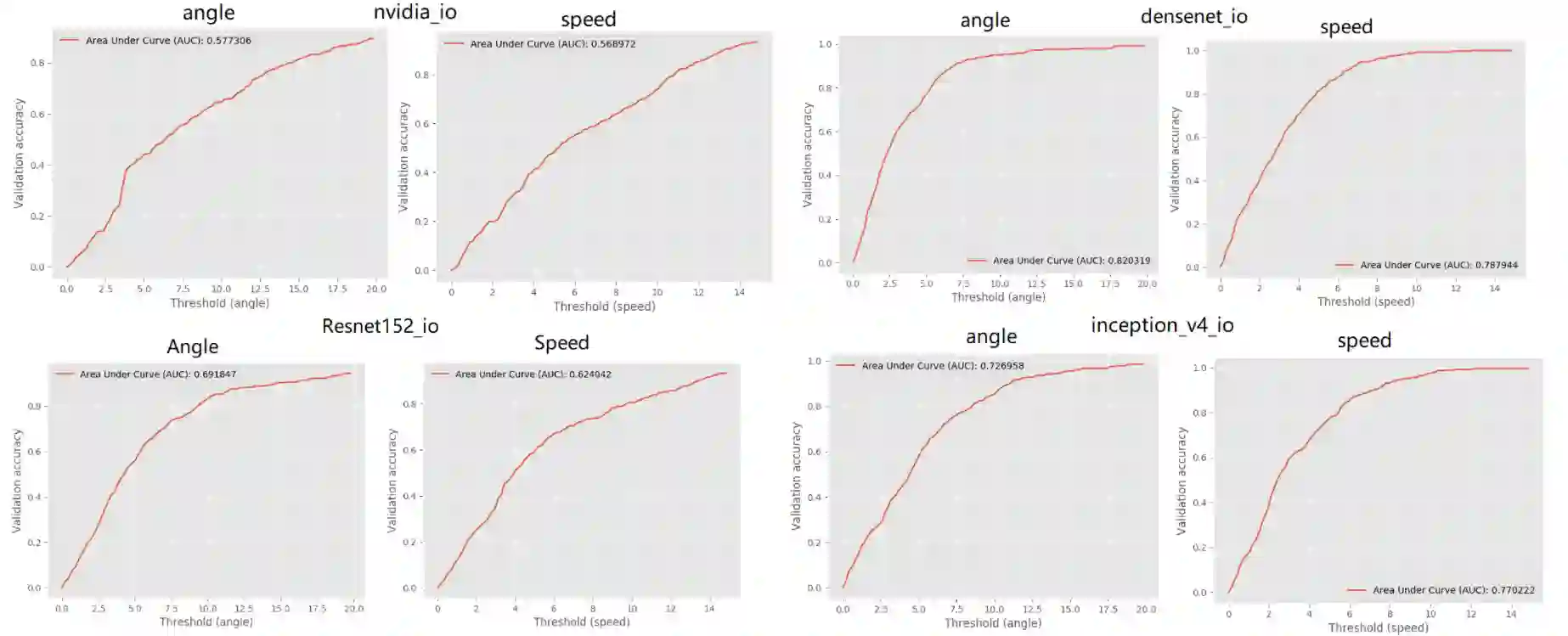
In this project, we implemented an end-to-end system that takes in combined visual features of video frames from a normal camera and depth information from a cloud points scanner, and predicts driving policies (vehicle speed and steering angle). We verified the safety of our system by comparing the predicted results with standard behaviors by real-world experienced drivers. Our test results show that the predictions can be considered as accurate in at lease half of the testing cases (50% 80%, depending on the model), and using combined features improved the performance in most cases than using video frames only.
翻译:在本项目中,我们实现了一个端到端系统,该系统接收来自普通摄像头的视频帧视觉特征与来自点云扫描仪的深度信息相结合,并预测驾驶策略(车辆速度与转向角)。通过将预测结果与现实世界经验丰富驾驶员的标准行为进行对比,我们验证了该系统的安全性。测试结果显示,在至少半数测试案例中(50%-80%,具体取决于模型),预测结果可视为准确,且与仅使用视频帧相比,在多数情况下结合多特征能提升系统性能。