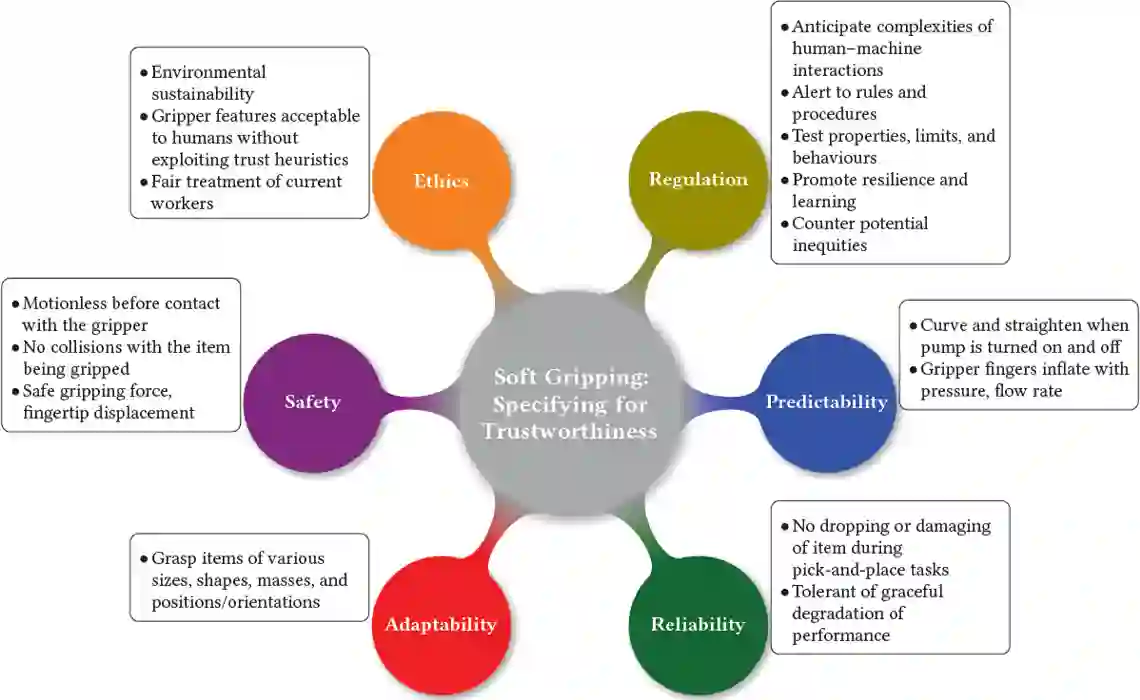
Soft robotics is an emerging technology in which engineers create flexible devices for use in a variety of applications. In order to advance the wide adoption of soft robots, ensuring their trustworthiness is essential; if soft robots are not trusted, they will not be used to their full potential. In order to demonstrate trustworthiness, a specification needs to be formulated to define what is trustworthy. However, even for soft robotic grippers, which is one of the most mature areas in soft robotics, the soft robotics community has so far given very little attention to formulating specifications. In this work, we discuss the importance of developing specifications during development of soft robotic systems, and present an extensive example specification for a soft gripper for pick-and-place tasks for grocery items. The proposed specification covers both functional and non-functional requirements, such as reliability, safety, adaptability, predictability, ethics, and regulations. We also highlight the need to promote verifiability as a first-class objective in the design of a soft gripper.
翻译:软体机器人是一种新兴技术,工程师可借此制造柔性设备以应用于各类场景。为促进软体机器人的广泛采用,确保其可信性至关重要——若软体机器人无法获得信任,其潜能便无法充分发挥。要验证可信性,必须制定规范以界定何为可信。然而,即便在软体机器人领域最成熟的方向之一——软体抓取器方面,相关学界迄今仍极少关注规范制定工作。本研究探讨了在软体机器人系统开发过程中制定规范的重要性,并针对超市商品拾取任务场景,提出了一份详尽的软体抓取器规范示例。该规范涵盖功能性与非功能性需求,包括可靠性、安全性、适应性、可预测性、伦理规范及法规遵从性。我们还强调,需将可验证性作为软体抓取器设计的首要目标予以推进。