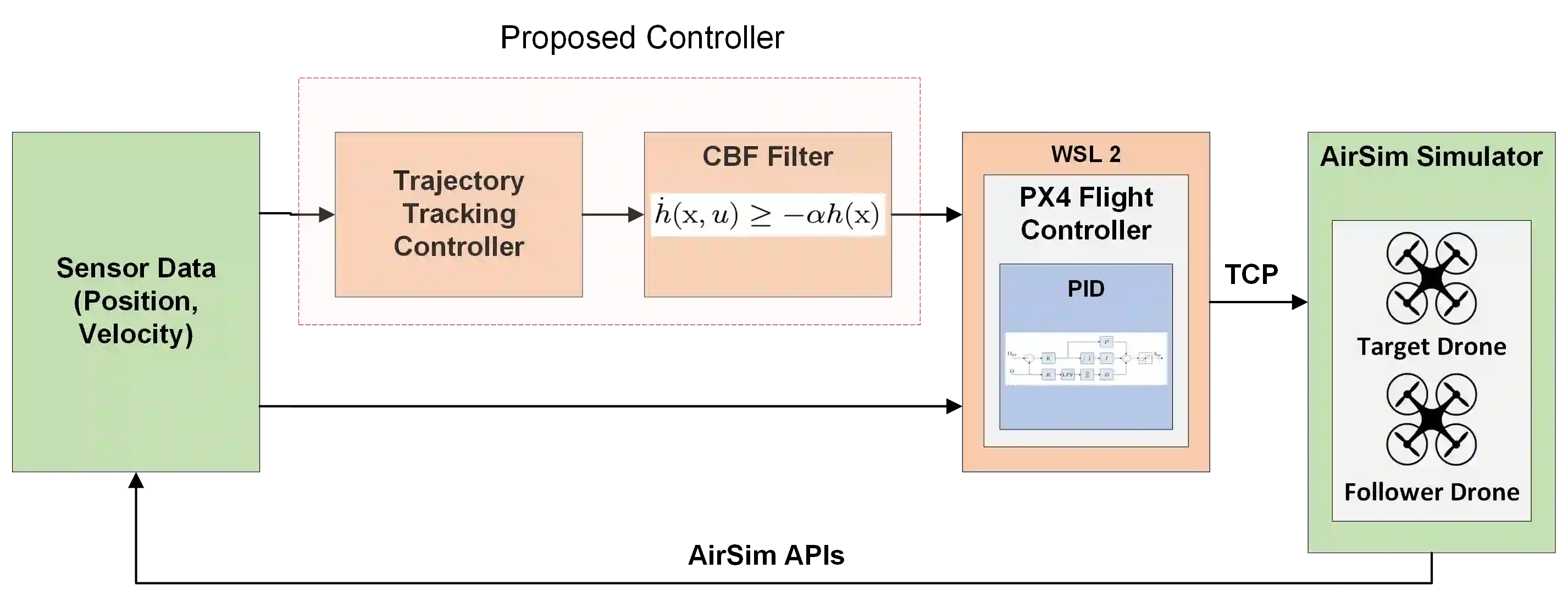
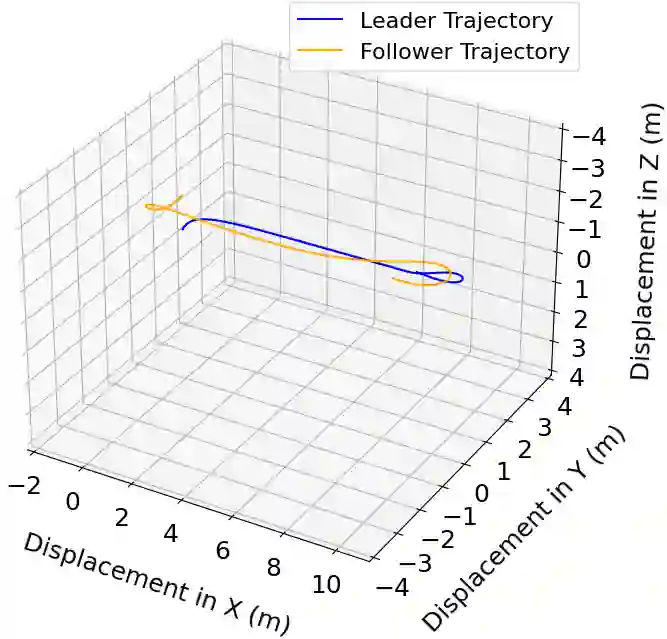
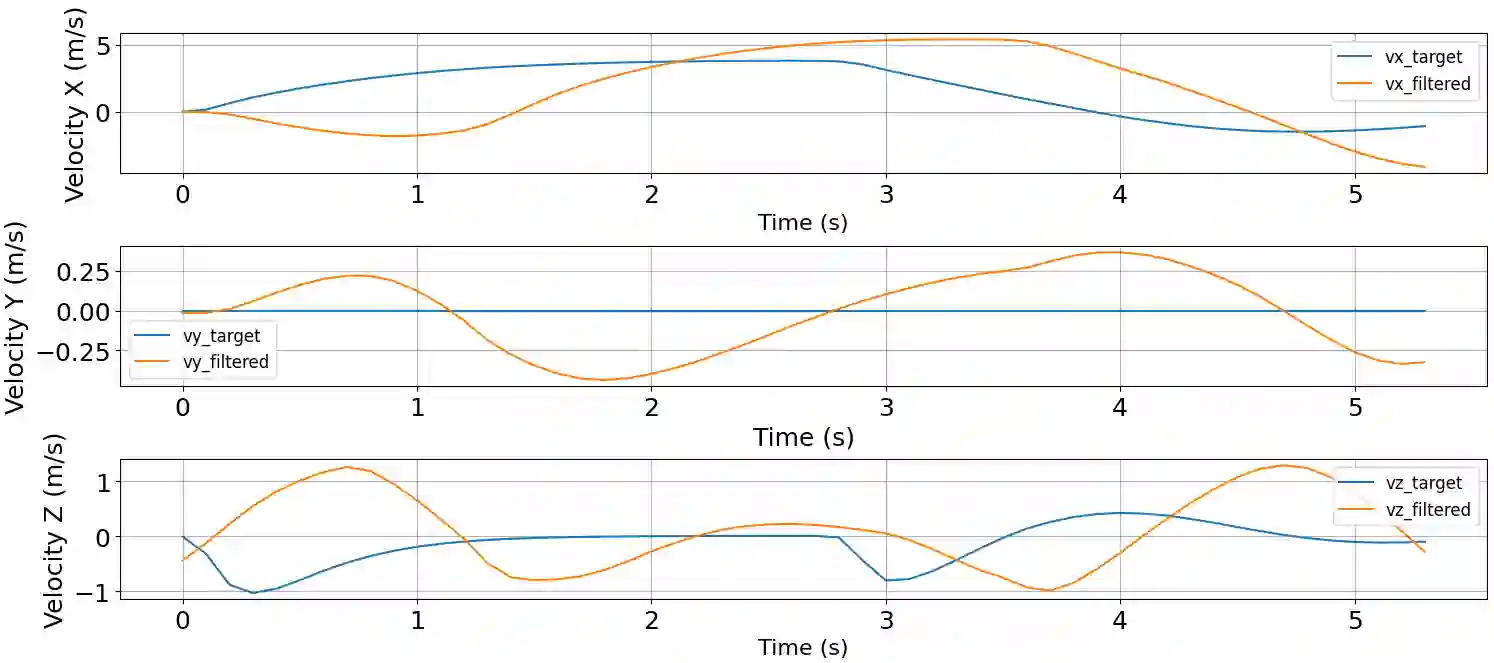
Safe operations of UAVs are of paramount importance for various mission-critical and safety-critical UAV applications. In context of airborne target tracking and following, UAVs need to track a flying target avoiding collision and also closely follow its trajectory. The safety situation becomes critical and more complex when the flying target is non-cooperative and has erratic movements. This paper proposes a method for collision avoidance in an autonomous fast moving dynamic quadrotor UAV tracking and following another target UAV. This is achieved by designing a safety controller that minimally modifies the control input from a trajectory tracking controller and guarantees safety. This method enables pairing our proposed safety controller with already existing flight controllers. Our safety controller uses a control barrier function based quadratic program (CBF-QP) to produce an optimal control input enabling safe operation while also follow the trajectory of the target closely. We implement our solution on AirSim simulator over PX4 flight controller and with numerical results, we validate our approach through several simulation experiments with multiple scenarios and trajectories.
翻译:无人机在多种关键任务与安全关键型应用中的安全操作至关重要。在空中目标追踪与跟随场景中,无人机需在避免碰撞的同时紧密跟随飞行目标的轨迹。当飞行目标为非合作目标且具有不规则运动时,安全态势将变得更为严峻与复杂。本文提出一种针对自主高速运动四旋翼无人机追踪与跟随另一目标无人机时的碰撞避免方法。通过设计一种安全控制器,该控制器对轨迹跟踪控制器的控制输入进行最小化调整,并保障安全性,从而实现上述目标。该方法使得所提安全控制器可与现有飞行控制器协同工作。本安全控制器采用基于控制障碍函数的二次规划(CBF-QP)生成最优控制输入,在保证安全操作的同时紧密跟踪目标轨迹。我们在AirSim仿真器中基于PX4飞控系统实现了该解决方案,并通过多场景多轨迹的仿真实验与数值结果验证了所提方法的有效性。