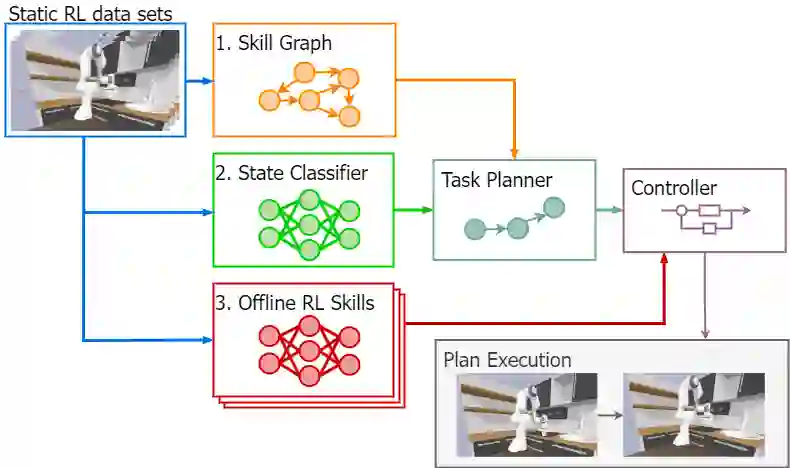
Reinforcement Learning has received wide interest due to its success in competitive games. Yet, its adoption in everyday applications is limited (e.g. industrial, home, healthcare, etc.). In this paper, we address this limitation by presenting a framework for planning over offline skills and solving complex tasks in real-world environments. Our framework is comprised of three modules that together enable the agent to learn from previously collected data and generalize over it to solve long-horizon tasks. We demonstrate our approach by testing it on a robotic arm that is required to solve complex tasks.
翻译:强化学习因在竞技类游戏中的成功而受到广泛关注,然而其在日常应用(如工业、家庭、医疗保健等)中的推广仍然有限。本文提出一种面向离线技能进行规划并在真实环境中解决复杂任务的框架,以应对上述局限性。该框架由三个模块组成,共同使智能体能够从先前收集的数据中学习,并对其进行泛化以解决长时域任务。我们通过在需要完成复杂任务的机械臂上进行测试,验证了该方法的有效性。