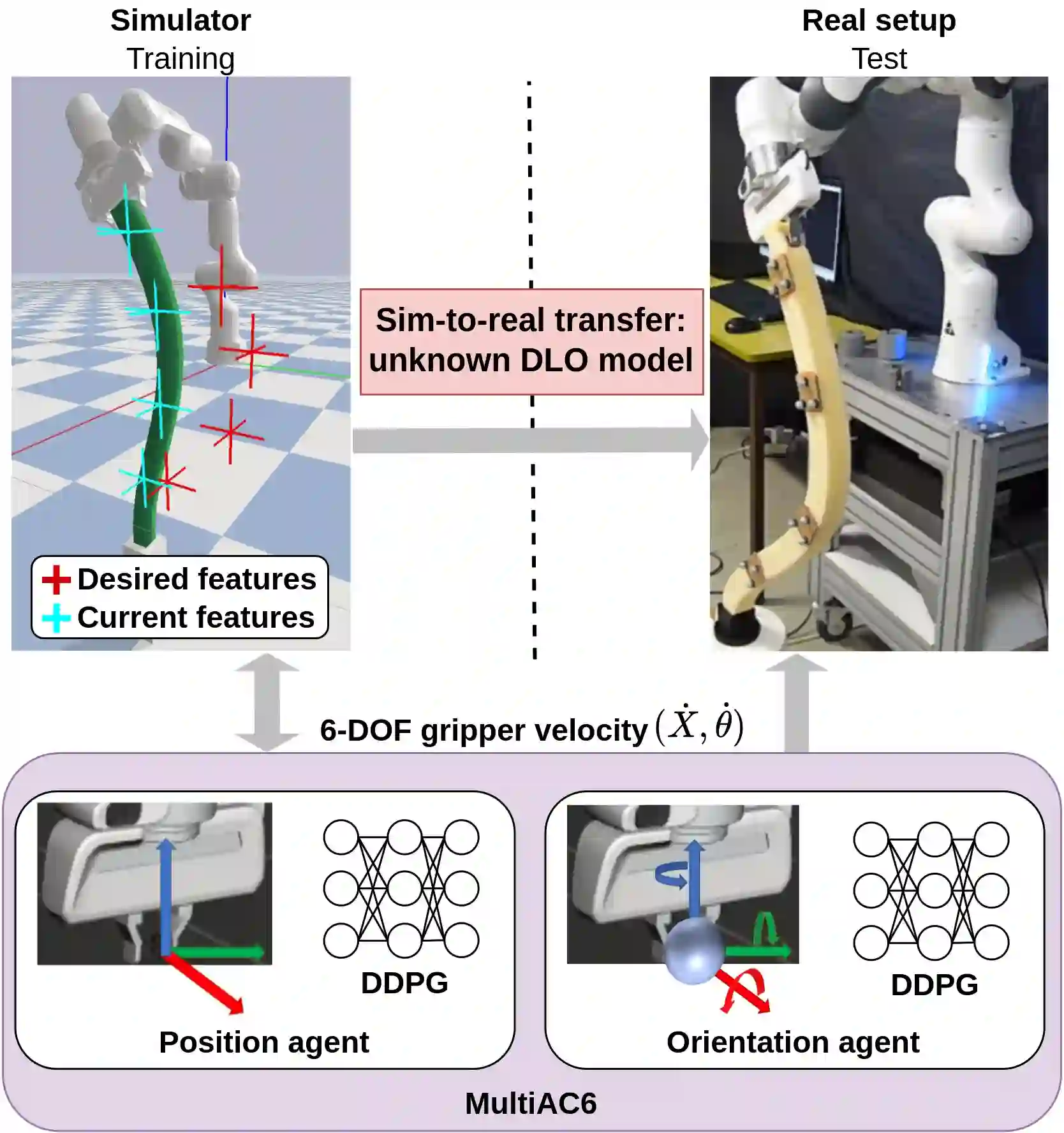
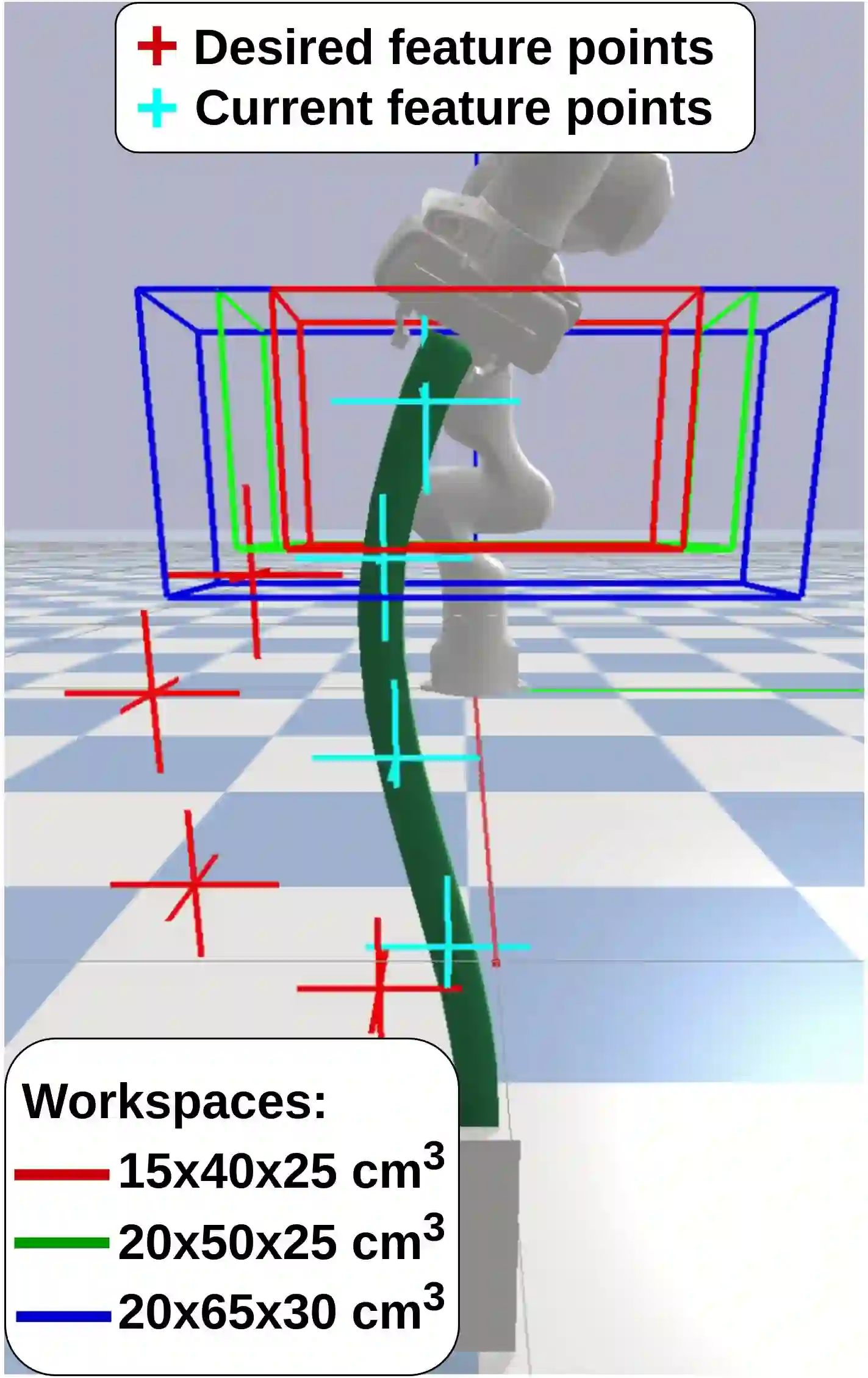
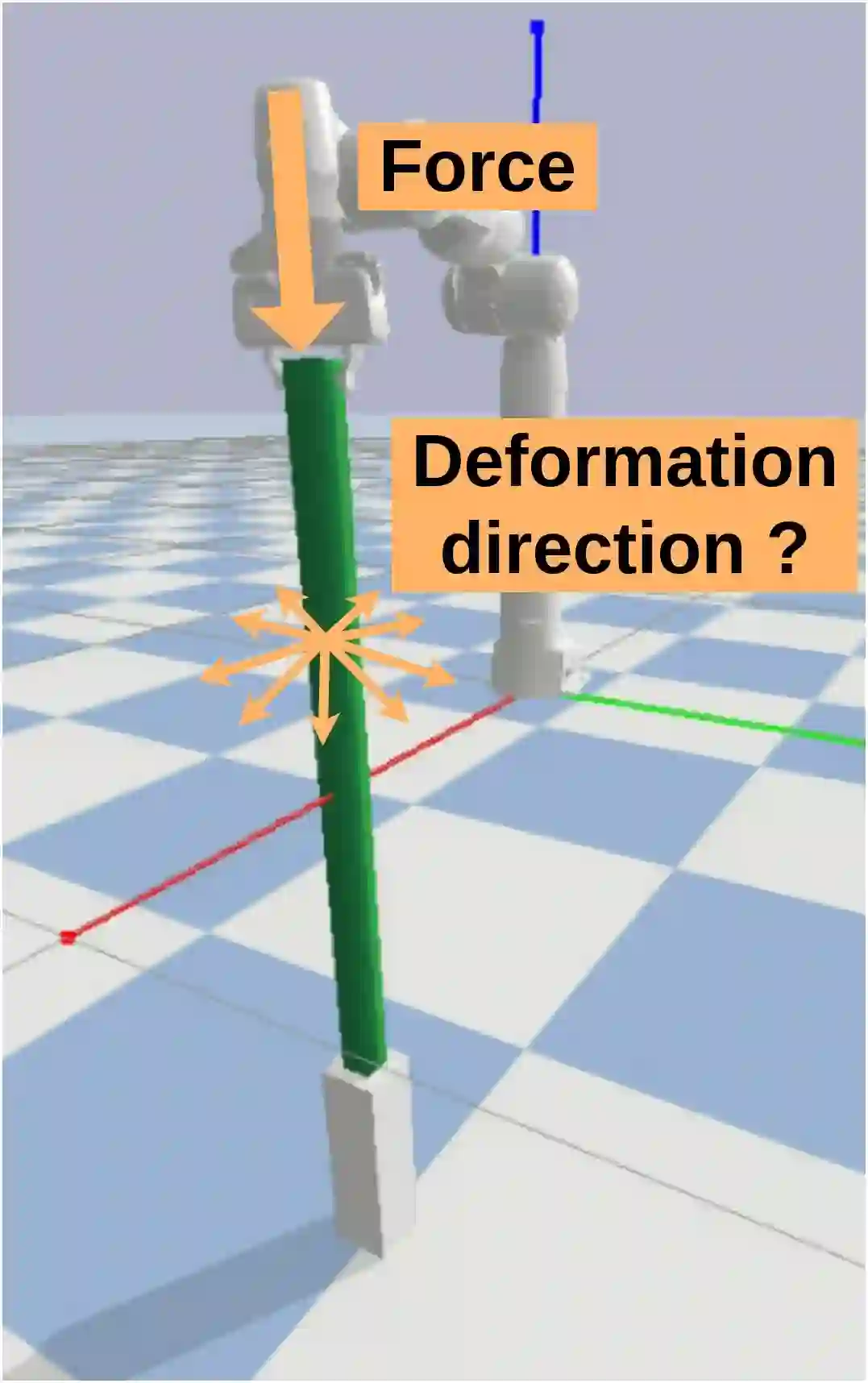
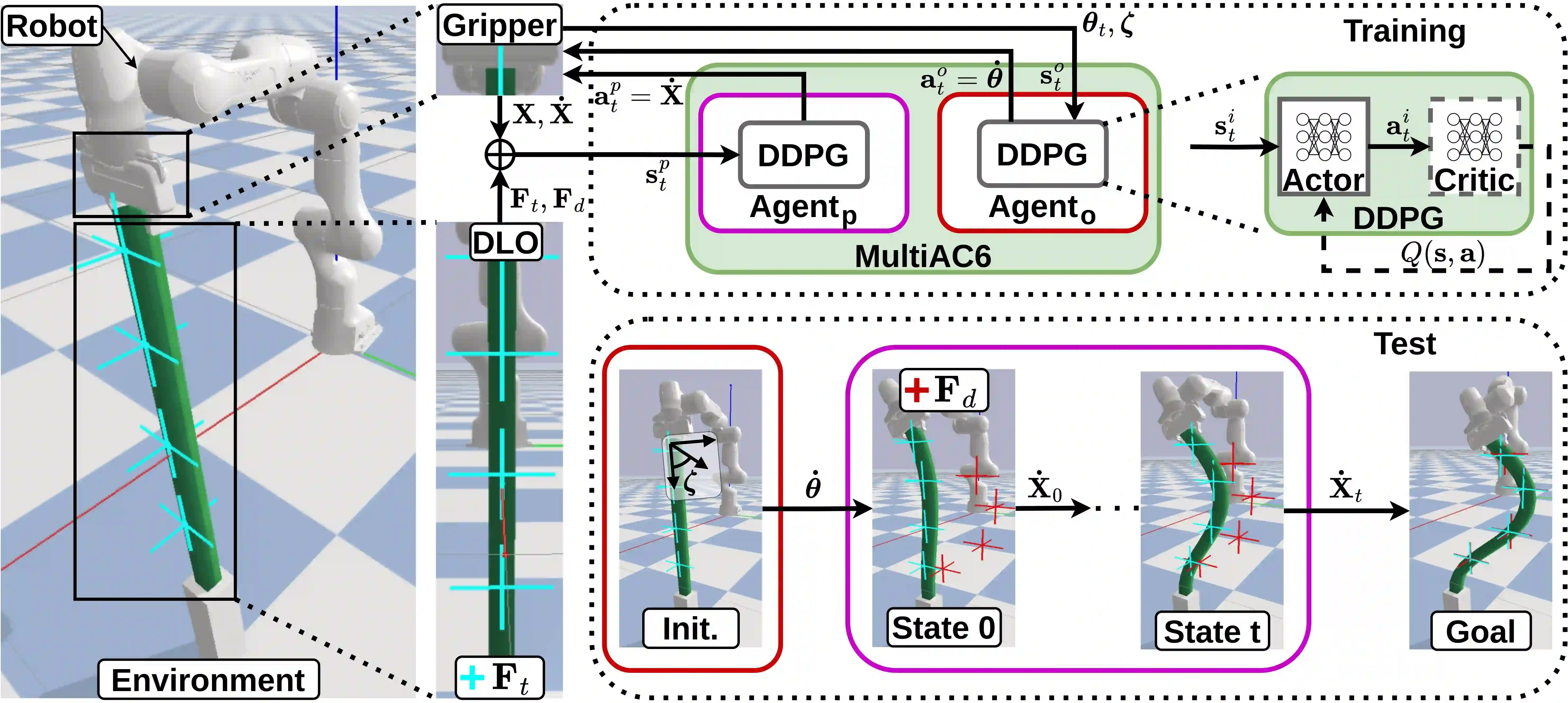
Robotic manipulation of deformable linear objects (DLOs) has great potential for applications in diverse fields such as agriculture or industry. However, a major challenge lies in acquiring accurate deformation models that describe the relationship between robot motion and DLO deformations. Such models are difficult to calculate analytically and vary among DLOs. Consequently, manipulating DLOs poses significant challenges, particularly in achieving large deformations that require highly accurate global models. To address these challenges, this paper presents MultiAC6: a new multi Actor-Critic framework for robot action space decomposition to control large 3D deformations of DLOs. In our approach, two deep reinforcement learning (DRL) agents orient and position a robot gripper to deform a DLO into the desired shape. Unlike previous DRL-based studies, MultiAC6 is able to solve the sim-to-real gap, achieving large 3D deformations up to 40 cm in real-world settings. Experimental results also show that MultiAC6 has a 66\% higher success rate than a single-agent approach. Further experimental studies demonstrate that MultiAC6 generalizes well, without retraining, to DLOs with different lengths or materials.
翻译:软体线性目标(DLOs)的机器人操控在农业或工业等不同领域具有巨大应用潜力。然而,主要挑战在于获取描述机器人运动与DLO变形之间关系的精确变形模型。这类模型难以解析计算,且不同DLO的模型各有差异。因此,操控DLO面临重大挑战,尤其需要高度精确的全局模型以实现大形变。针对上述问题,本文提出MultiAC6:一种用于机器人动作空间分解的新型多Actor-Critic框架,以控制DLO的三维大形变。该方法中,两个深度强化学习(DRL)智能体分别控制机器人夹爪的朝向和位置,将DLO形变为目标形状。与以往基于DRL的研究不同,MultiAC6能够解决仿真到现实的差距,在真实场景中实现高达40厘米的三维大形变。实验结果表明,MultiAC6的成功率比单智能体方法高出66%。进一步的实验研究证明,无需重新训练,MultiAC6即可泛化至不同长度或材质的DLO。