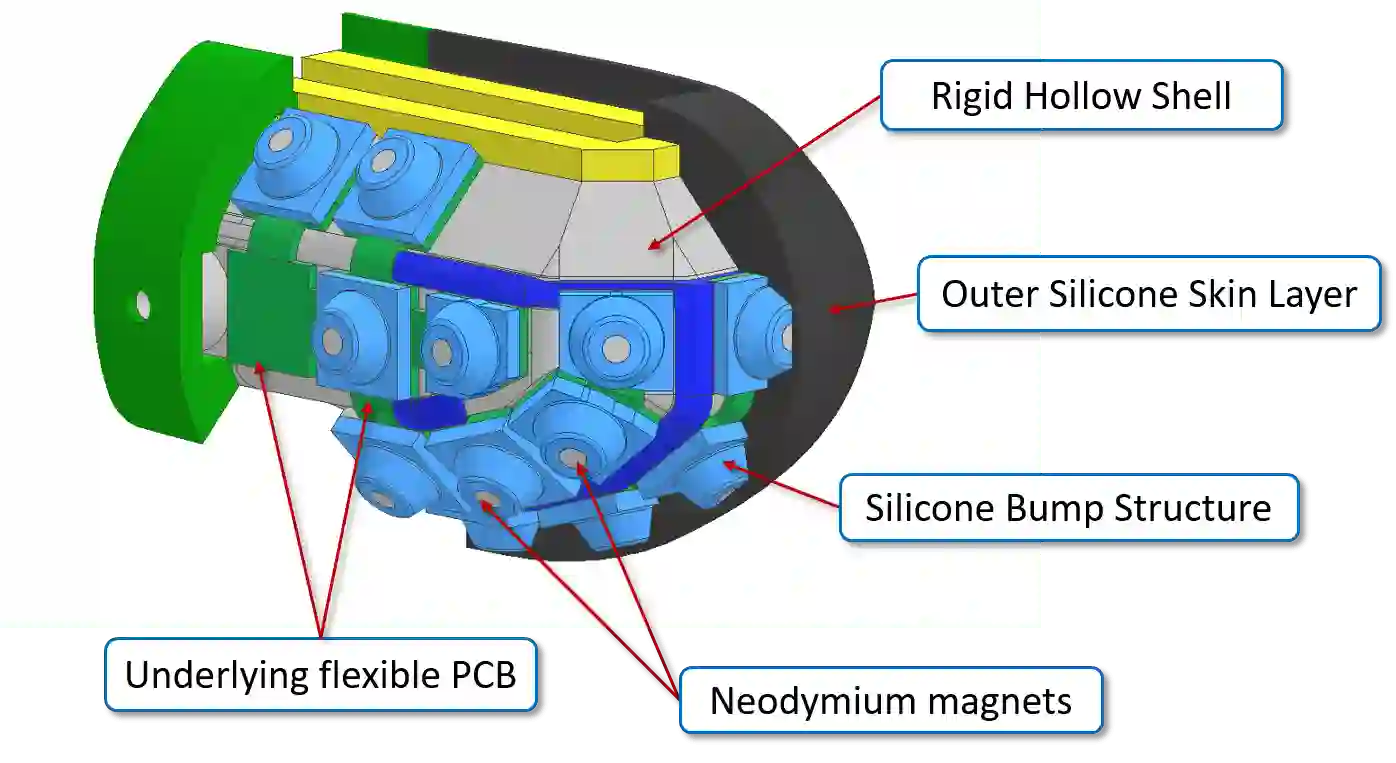
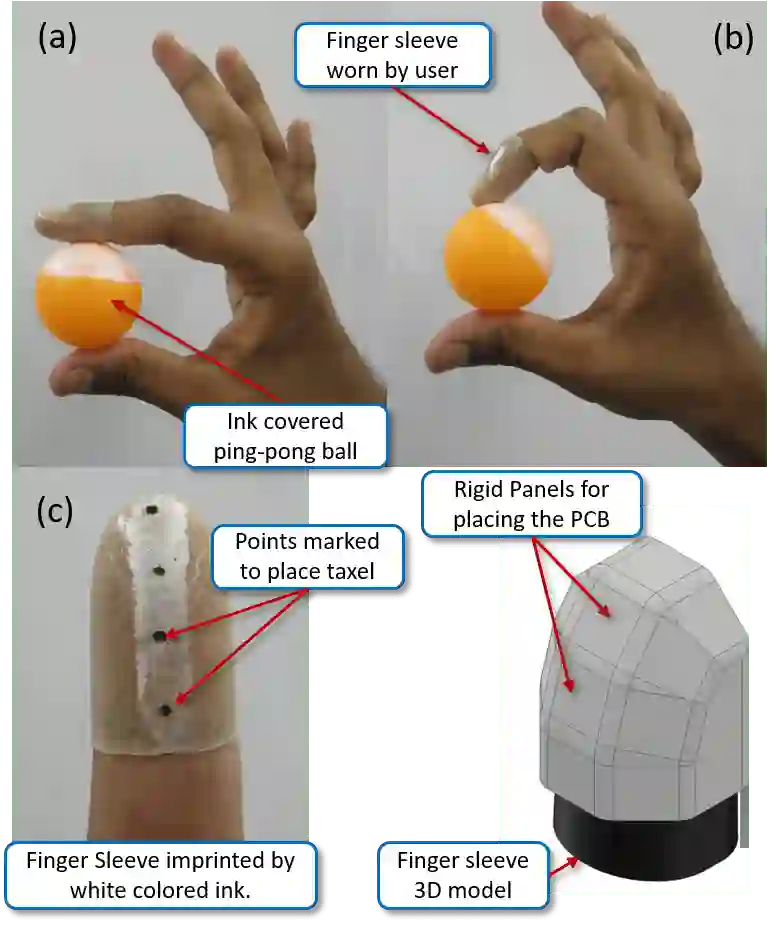
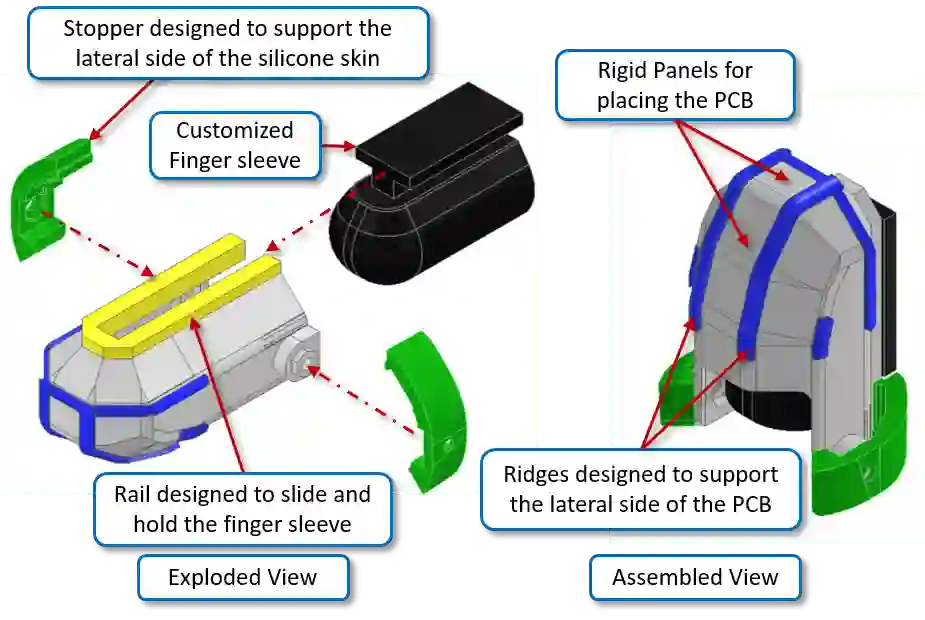
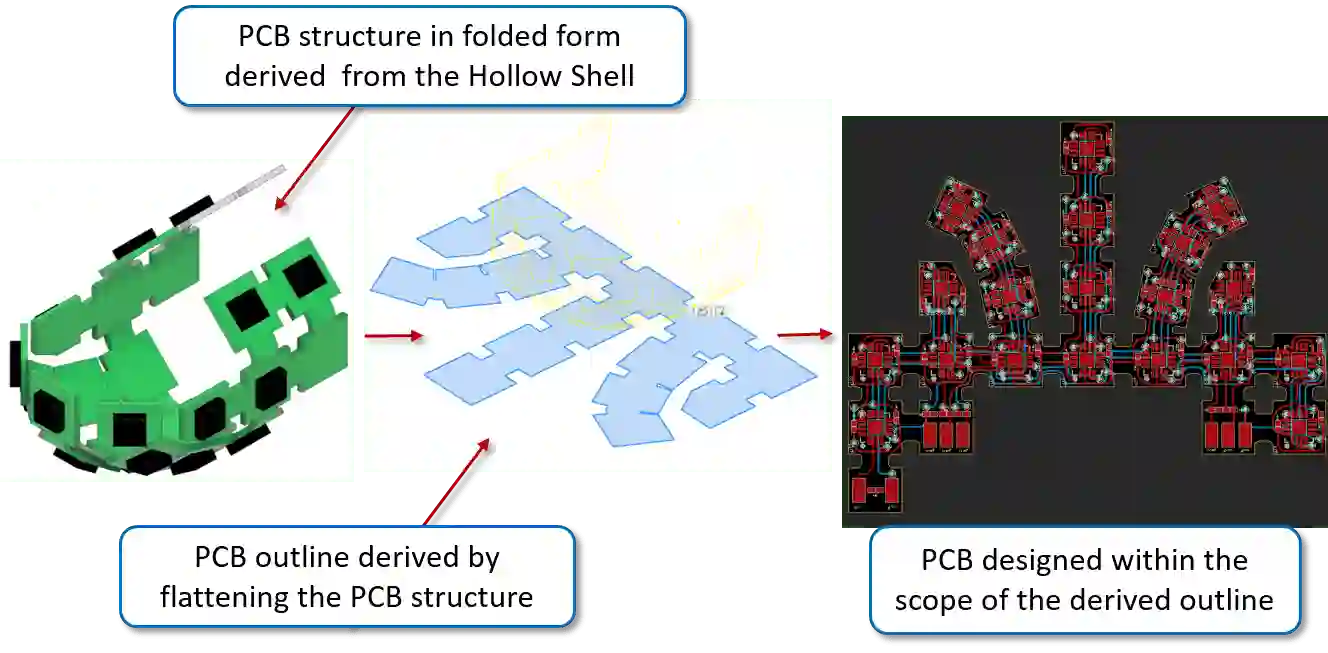
Skill transfer from humans to robots is challenging. Presently, many researchers focus on capturing only position or joint angle data from humans to teach the robots. Even though this approach has yielded impressive results for grasping applications, reconstructing motion for object handling or fine manipulation from a human hand to a robot hand has been sparsely explored. Humans use tactile feedback to adjust their motion to various objects, but capturing and reproducing the applied forces is an open research question. In this paper we introduce a wearable fingertip tactile sensor, which captures the distributed 3-axis force vectors on the fingertip. The fingertip tactile sensor is interchangeable between the human hand and the robot hand, meaning that it can also be assembled to fit on a robot hand such as the Allegro hand. This paper presents the structural aspects of the sensor as well as the methodology and approach used to design, manufacture, and calibrate the sensor. The sensor is able to measure forces accurately with a mean absolute error of 0.21, 0.16, and 0.44 Newtons in X, Y, and Z directions, respectively.
翻译:从人类向机器人进行技能迁移极具挑战性。目前,许多研究者仅关注通过捕捉人类的位置或关节角度数据来教导机器人。尽管这种方法在抓取任务中取得了显著成果,但针对物体操作或精细操作的动作重建(从人类手部到机器人手部)仍鲜有探索。人类利用触觉反馈来调节对不同物体的运动,然而如何捕捉并复现施加的力仍是一个开放性的研究问题。本文介绍了一款可穿戴的指尖触觉传感器,它能捕捉指尖上分布的3轴力向量。该指尖触觉传感器可在人类手部与机器人手部之间互换使用,这意味着它同样可以装配到如Allegro手等机器人手上。本文阐述了传感器的结构设计,以及用于设计、制造和标定传感器的方法论与实现途径。该传感器能精确测量力,在X、Y、Z方向的平均绝对误差分别为0.21牛顿、0.16牛顿和0.44牛顿。