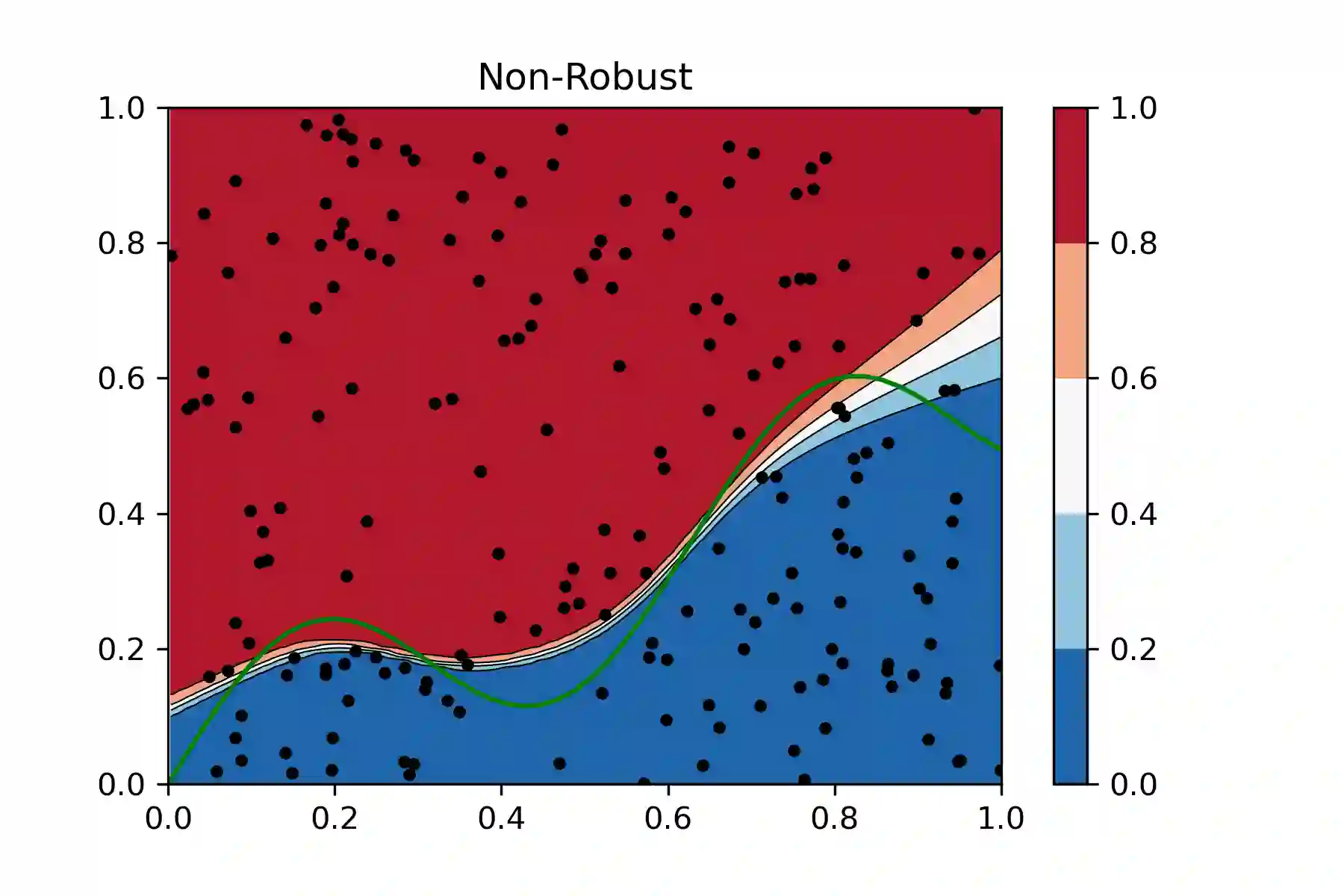
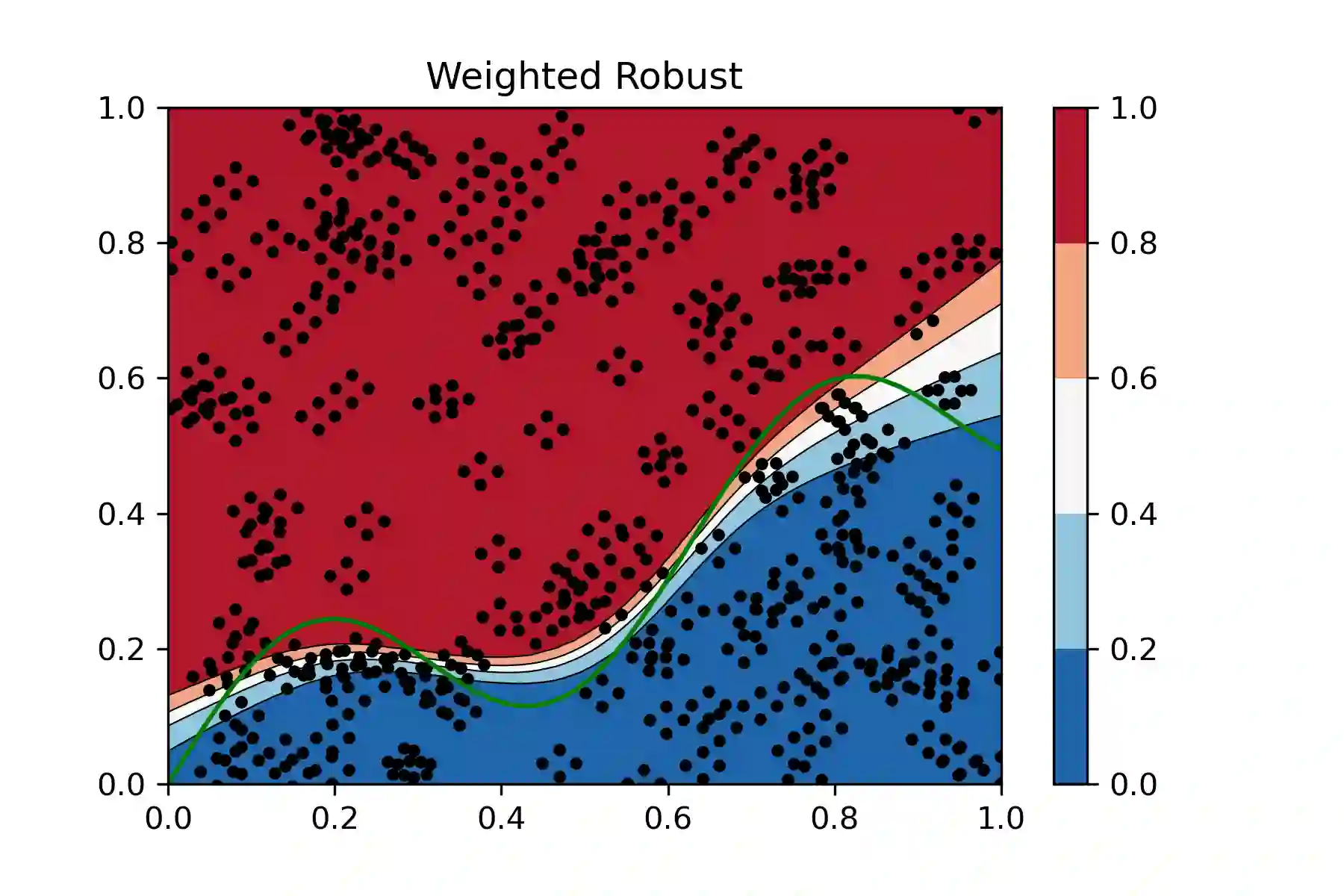
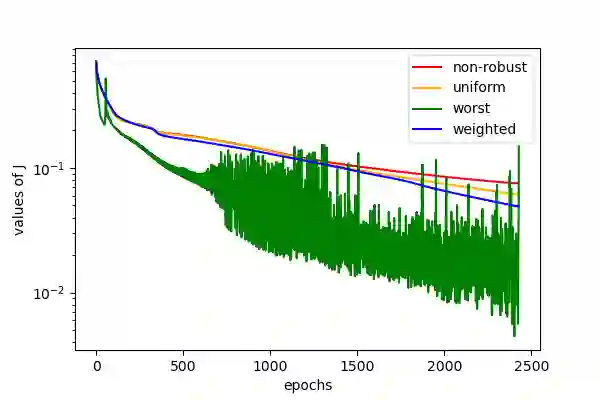
In this paper, we address the adversarial training of neural ODEs from a robust control perspective. This is an alternative to the classical training via empirical risk minimization, and it is widely used to enforce reliable outcomes for input perturbations. Neural ODEs allow the interpretation of deep neural networks as discretizations of control systems, unlocking powerful tools from control theory for the development and the understanding of machine learning. In this specific case, we formulate the adversarial training with perturbed data as a minimax optimal control problem, for which we derive first order optimality conditions in the form of Pontryagin's Maximum Principle. We provide a novel interpretation of robust training leading to an alternative weighted technique, which we test on a low-dimensional classification task.
翻译:本文从鲁棒控制角度探讨了神经常微分方程的对抗训练方法。这是通过经验风险最小化进行经典训练的一种替代方案,广泛用于强制输入扰动下的可靠输出。神经常微分方程允许将深度神经网络解释为控制系统的离散化,从而解锁控制理论中用于机器学习开发与理解的有力工具。针对这一具体场景,我们将带扰动数据的对抗训练建模为最小最大最优控制问题,并推导出以庞特里亚金最大值原理形式呈现的一阶最优性条件。我们提出了鲁棒训练的新解释,推导出一种替代性加权技术,并在低维分类任务上进行了验证。