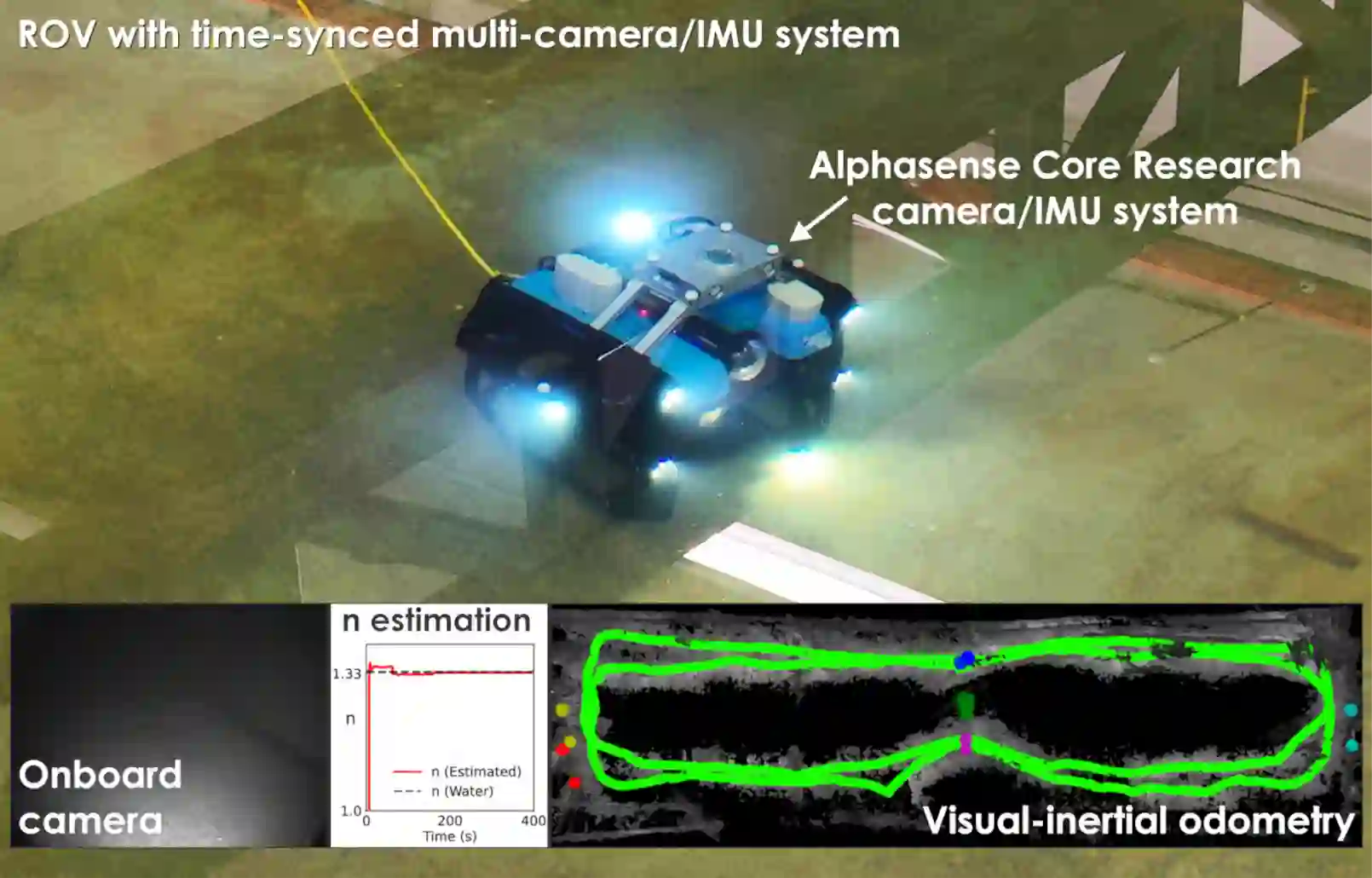
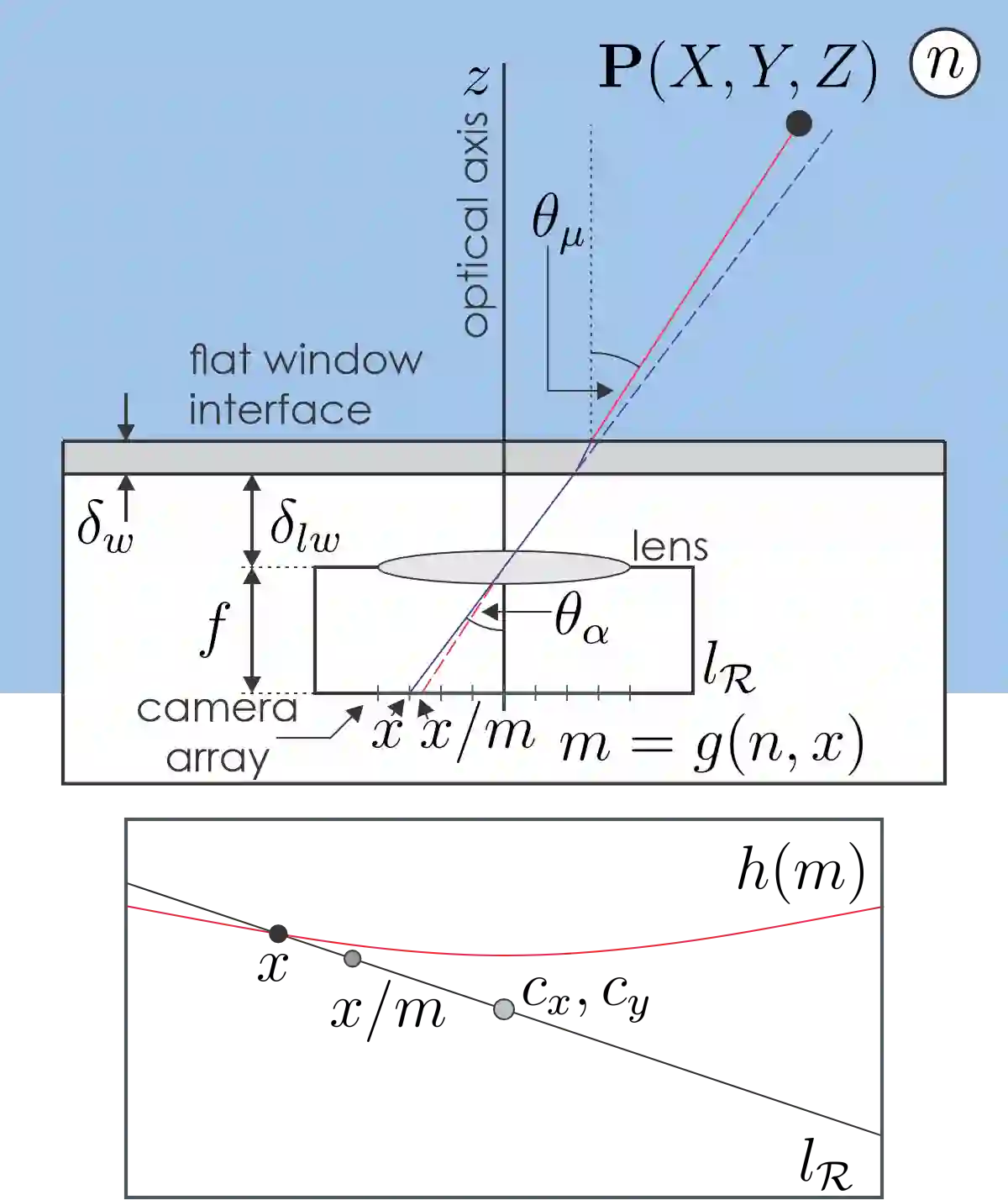
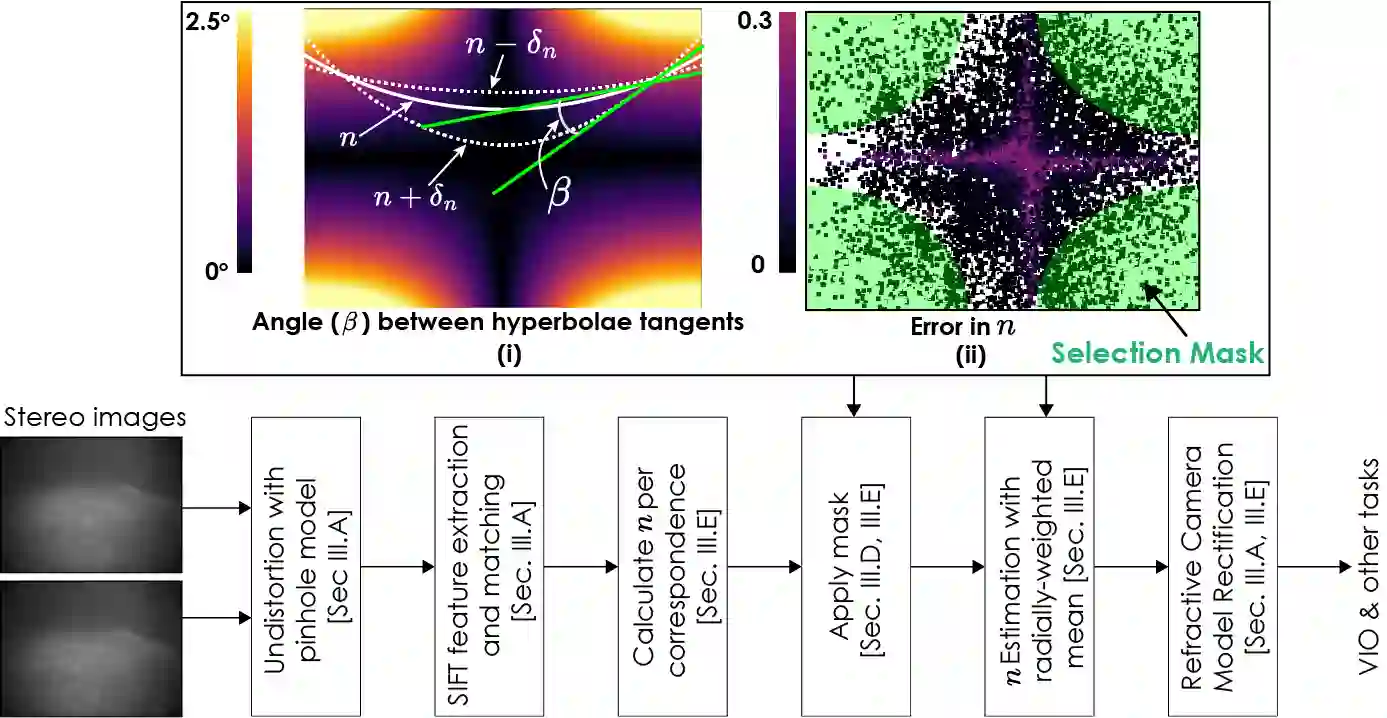
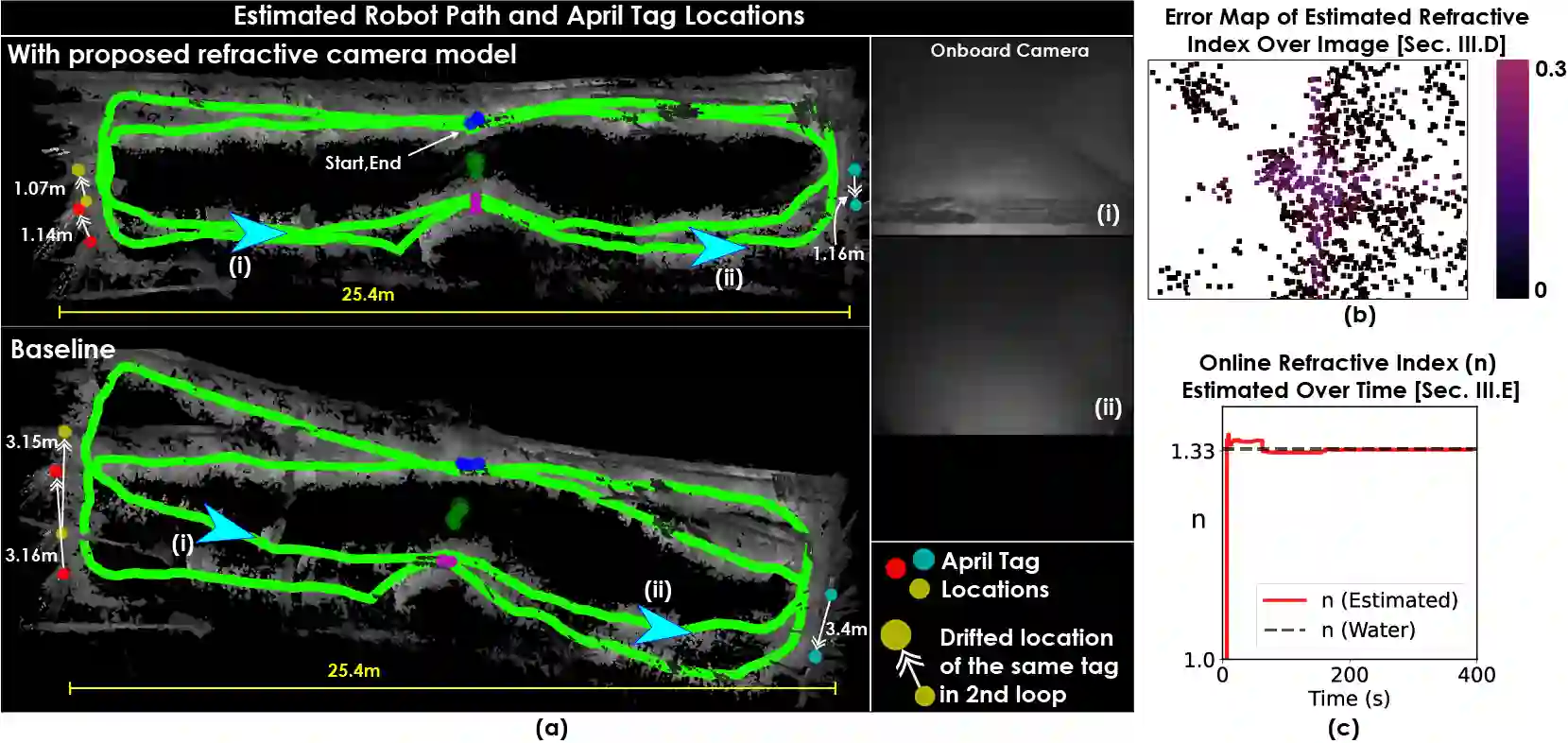
This work presents a camera model for refractive media such as water and its application in underwater visual-inertial odometry. The model is self-calibrating in real-time and is free of known correspondences or calibration targets. It is separable as a distortion model (dependent on refractive index $n$ and radial pixel coordinate) and a virtual pinhole model (as a function of $n$). We derive the self-calibration formulation leveraging epipolar constraints to estimate the refractive index and subsequently correct for distortion. Through experimental studies using an underwater robot integrating cameras and inertial sensing, the model is validated regarding the accurate estimation of the refractive index and its benefits for robust odometry estimation in an extended envelope of conditions. Lastly, we show the transition between media and the estimation of the varying refractive index online, thus allowing computer vision tasks across refractive media.
翻译:本文提出了一种针对水等折射介质的相机模型,并将其应用于水下视觉-惯性里程计。该模型具有在线实时自标定能力,无需已知对应点或标定靶标。模型可分解为畸变模型(依赖于折射率$n$和径向像素坐标)和虚拟针孔模型(作为$n的函数)。我们利用对极约束推导出自标定公式,用于估计折射率并随后校正畸变。通过使用集成相机与惯性传感的水下机器人进行的实验研究,该模型在折射率精确估计及其在扩展工况下鲁棒里程计估计中的优势得到了验证。最后,我们展示了介质切换过程及折射率的在线变化估计,从而使得跨折射介质的计算机视觉任务成为可能。