
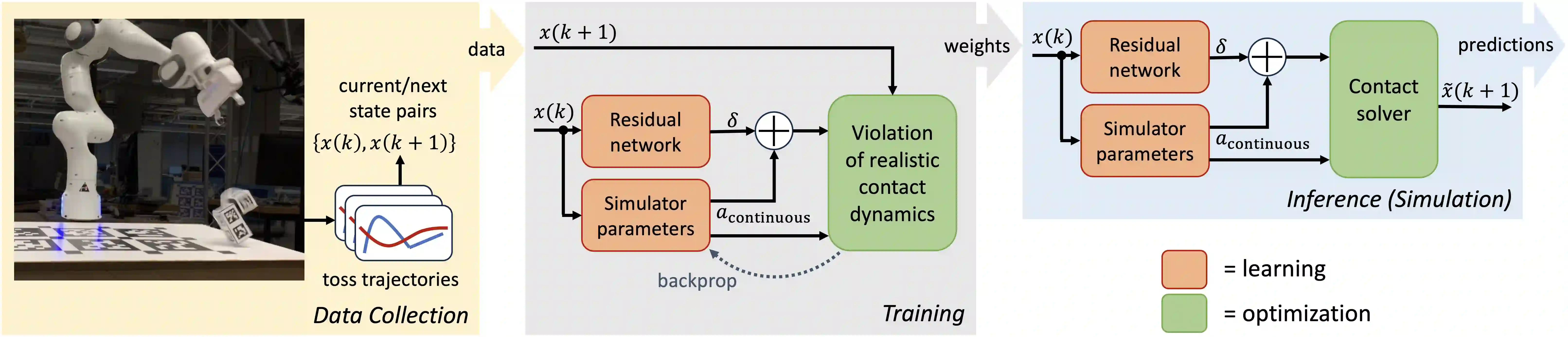
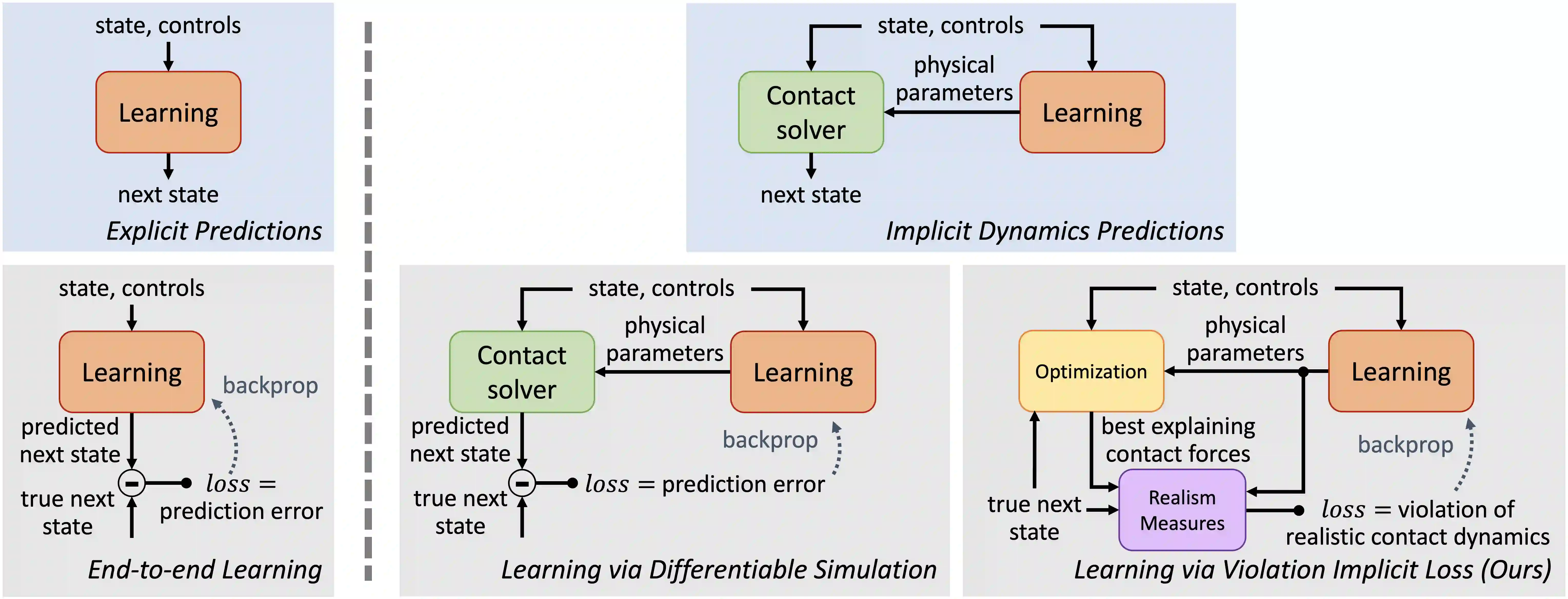
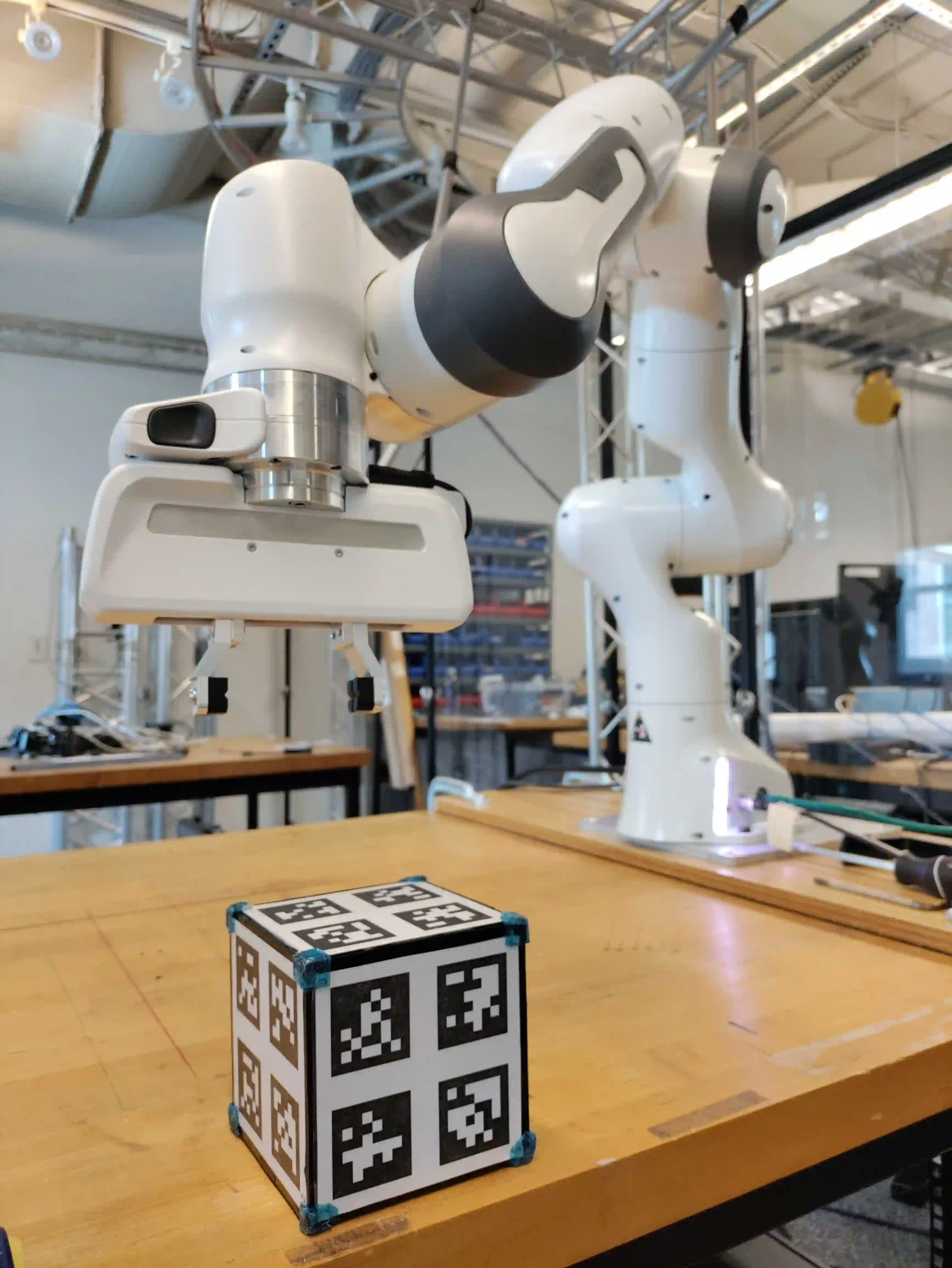
Robotic manipulation can greatly benefit from the data efficiency, robustness, and predictability of model-based methods if robots can quickly generate models of novel objects they encounter. This is especially difficult when effects like complex joint friction lack clear first-principles models and are usually ignored by physics simulators. Further, numerically-stiff contact dynamics can make common model-building approaches struggle. We propose a method to simultaneously learn contact and continuous dynamics of a novel, possibly multi-link object by observing its motion through contact-rich trajectories. We formulate a system identification process with a loss that infers unmeasured contact forces, penalizing their violation of physical constraints and laws of motion given current model parameters. Our loss is unlike prediction-based losses used in differentiable simulation. Using a new dataset of real articulated object trajectories and an existing cube toss dataset, our method outperforms differentiable simulation and end-to-end alternatives with more data efficiency. See our project page for code, datasets, and media: https://sites.google.com/view/continuous-contact-nets/home
翻译:机器人操作若能快速生成所遇新物体的模型,则可从基于模型方法的数据效率、鲁棒性和可预测性中获益。当复杂关节摩擦等效应缺乏明确的第一性原理模型且通常被物理模拟器忽略时,这一目标尤为困难。此外,数值刚性的接触动力学常使常见建模方法难以奏效。我们提出一种方法,通过观测物体在接触丰富的轨迹中的运动,同时学习新型(可能为多连杆)物体的接触与连续动力学。我们构建了一个系统辨识过程,其损失函数通过推断未测量的接触力,根据当前模型参数对这些力违反物理约束和运动定律的行为施加惩罚。该损失函数不同于可微分模拟中基于预测的损失。利用我们新采集的真实铰接物体轨迹数据集以及现有立方体投掷数据集,我们的方法以更高的数据效率优于可微分模拟和端到端替代方法。代码、数据集及多媒体资料详见项目页面:https://sites.google.com/view/continuous-contact-nets/home

相关内容

Source: Apple - iOS 8

