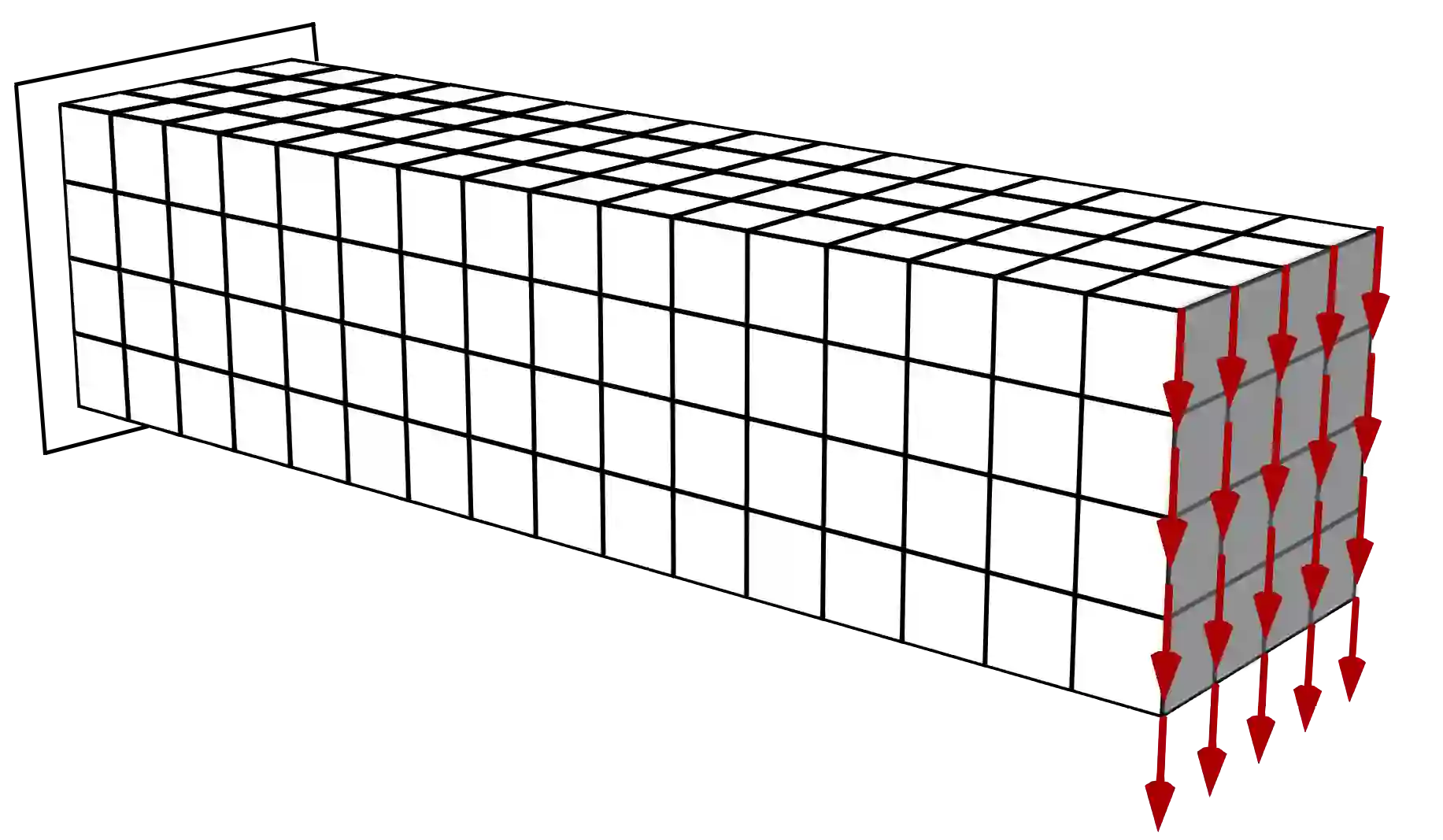
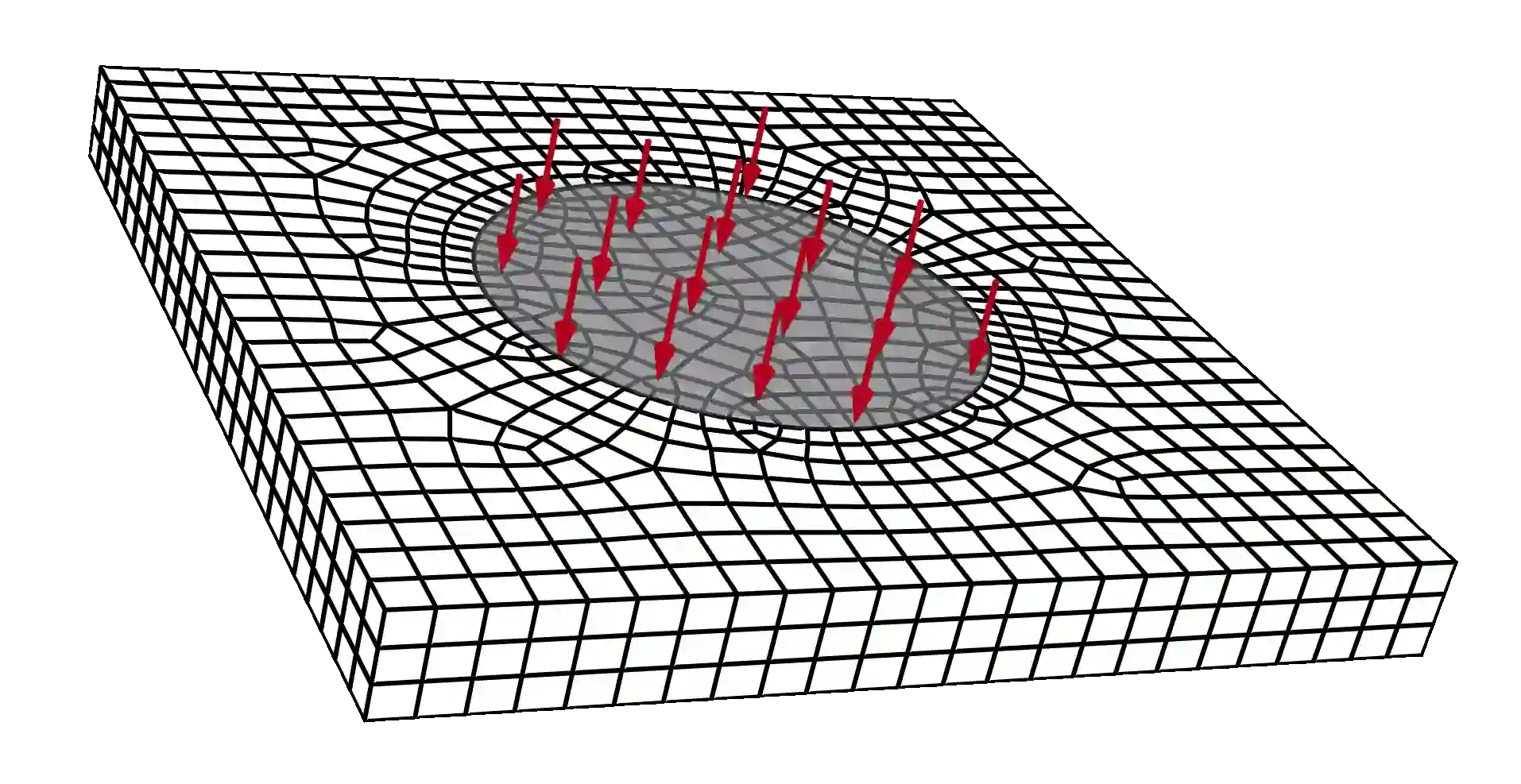
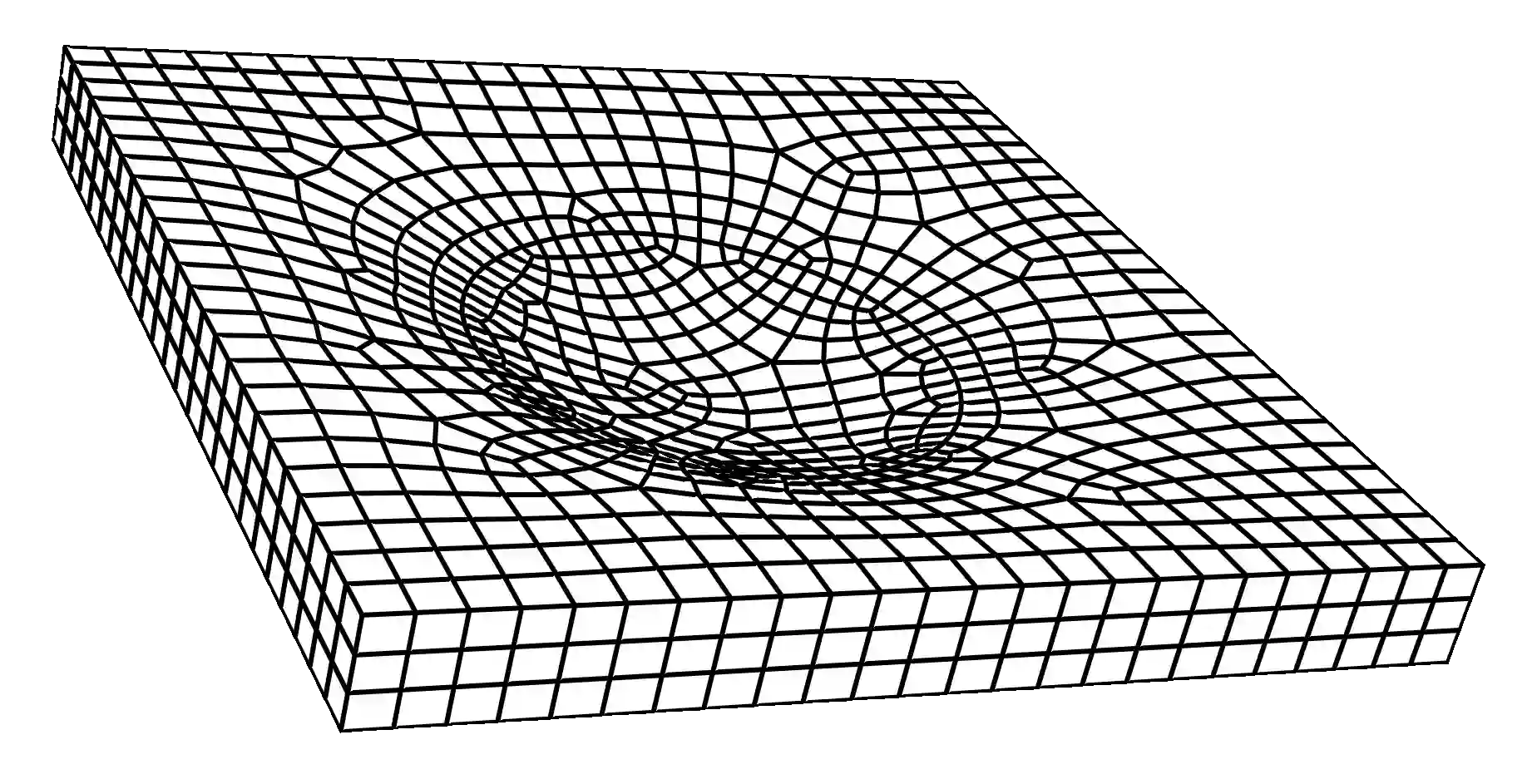
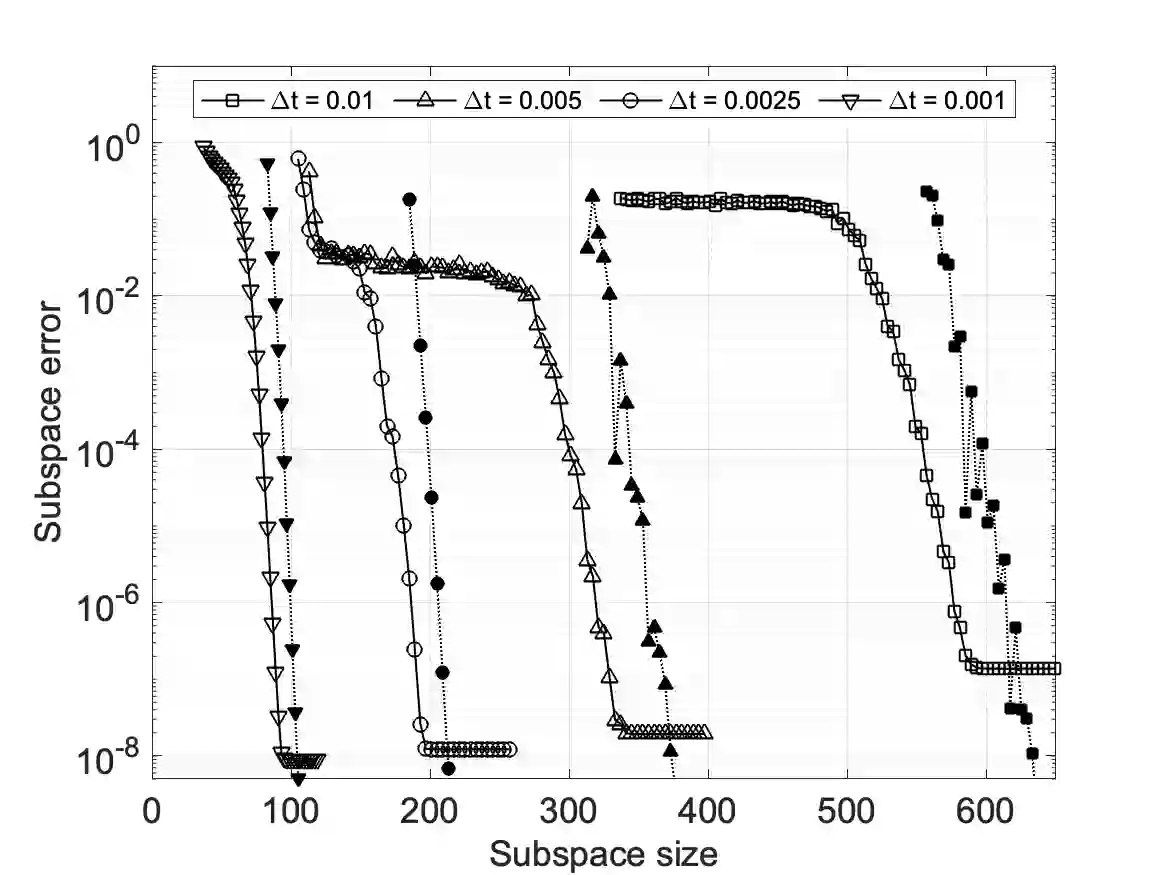
We propose a computationally efficient and systematically convergent approach for elastodynamics simulations. We recast the second-order dynamical equation of elastodynamics into an equivalent first-order system of coupled equations, so as to express the solution in the form of a Magnus expansion. With any spatial discretization, it entails computing the exponential of a matrix acting upon a vector. We employ an adaptive Krylov subspace approach to inexpensively and and accurately evaluate the action of the exponential matrix on a vector. In particular, we use an apriori error estimate to predict the optimal Kyrlov subspace size required for each time-step size. We show that the Magnus expansion truncated after its first term provides quadratic and superquadratic convergence in the time-step for nonlinear and linear elastodynamics, respectively. We demonstrate the accuracy and efficiency of the proposed method for one linear (linear cantilever beam) and three nonlinear (nonlinear cantilever beam, soft tissue elastomer, and hyperelastic rubber) benchmark systems. For a desired accuracy in energy, displacement, and velocity, our method allows for $10-100\times$ larger time-steps than conventional time-marching schemes such as Newmark-$\beta$ method. Computationally, it translates to a $\sim$$1000\times$ and $\sim$$10-100\times$ speed-up over conventional time-marching schemes for linear and nonlinear elastodynamics, respectively.
翻译:我们提出了一种计算高效且系统收敛的弹性动力学模拟方法。通过将弹性动力学二阶运动方程转化为等价的耦合方程一阶系统,我们将解表示为马格努斯展开形式。在任意空间离散化条件下,该方法需计算矩阵指数作用于向量的结果。我们采用自适应Krylov子空间方法,以低成本且高精度地评估指数矩阵对向量的作用。特别地,我们利用先验误差估计预测每个时间步长所需的最优Krylov子空间维度。研究表明,截断至首项的马格努斯展开在非线性与线性弹性动力学中分别实现时间步长的二次与超二次收敛。我们通过一个线性(线性悬臂梁)和三个非线性(非线性悬臂梁、软组织弹性体、超弹性橡胶)基准系统验证了该方法的精度与效率。在能量、位移和速度达到目标精度的条件下,本方法允许采用比Newmark-β法等传统时间推进方法大10-100倍的时间步长。计算效率方面,该方法在线性弹性动力学中实现约1000倍加速,在非线性弹性动力学中实现约10-100倍加速。