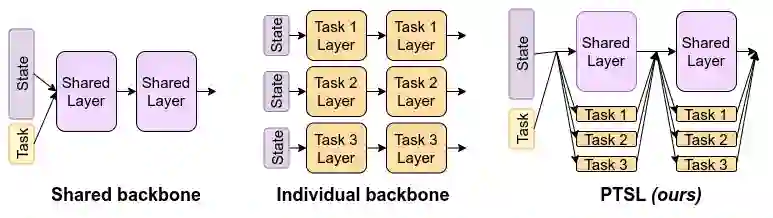
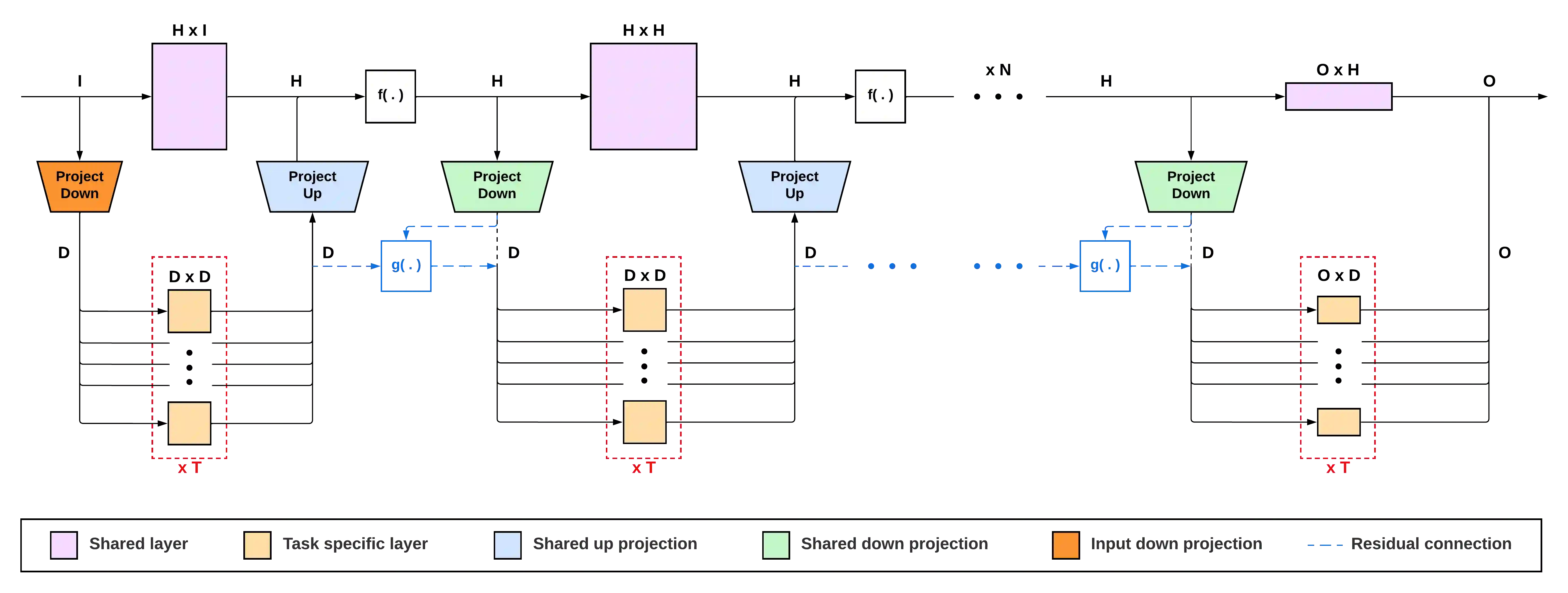
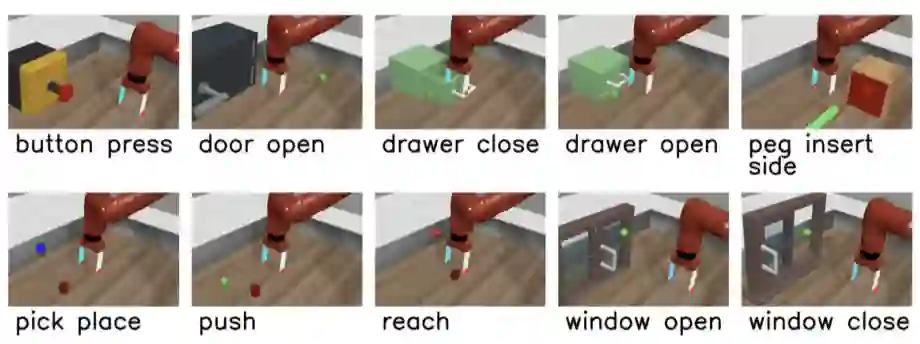
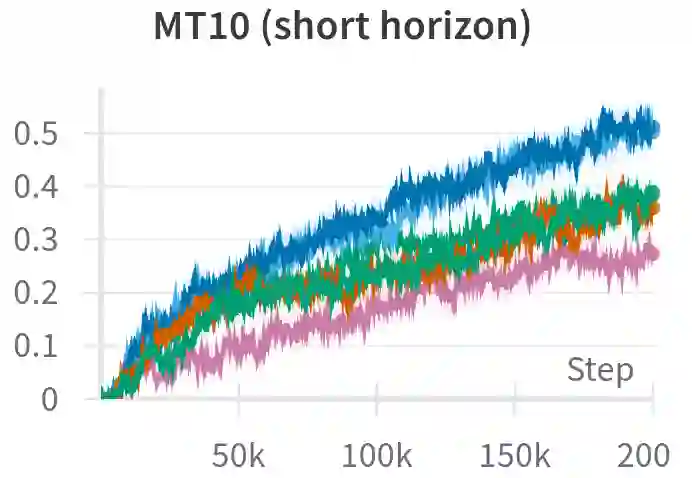
Multi-task reinforcement learning could enable robots to scale across a wide variety of manipulation tasks in homes and workplaces. However, generalizing from one task to another and mitigating negative task interference still remains a challenge. Addressing this challenge by successfully sharing information across tasks will depend on how well the structure underlying the tasks is captured. In this work, we introduce our new architecture, Projected Task-Specific Layers (PTSL), that leverages a common policy with dense task-specific corrections through task-specific layers to better express shared and variable task information. We then show that our model outperforms the state of the art on the MT10 and MT50 benchmarks of Meta-World consisting of 10 and 50 goal-conditioned tasks for a Sawyer arm.
翻译:多任务强化学习能够使机器人在家庭和工作场所中跨多种操作任务进行规模化应用。然而,在不同任务间进行泛化以及缓解负向任务干扰仍是难题。通过跨任务成功共享信息来应对这一挑战,将取决于对任务内在结构的捕获程度。本文提出一种新型架构——投影任务特定层(PTSL),通过任务特定层利用通用策略与密集的任务特定修正,更好地表达共享与可变的任务信息。实验表明,在包含10个和50个目标条件任务(针对Sawyer机械臂)的Meta-World基准测试MT10和MT50上,我们的模型性能超越了现有最优方法。