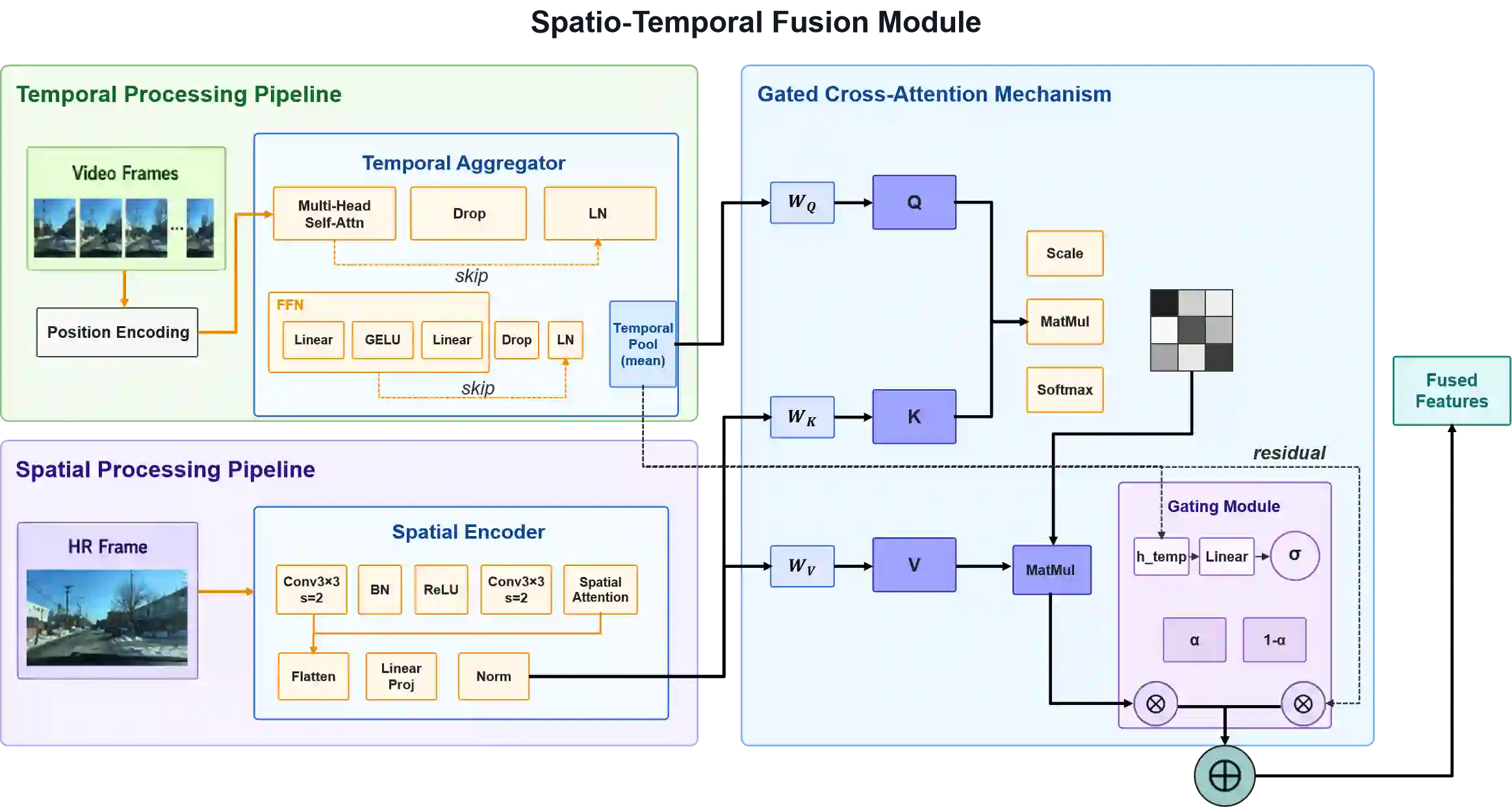
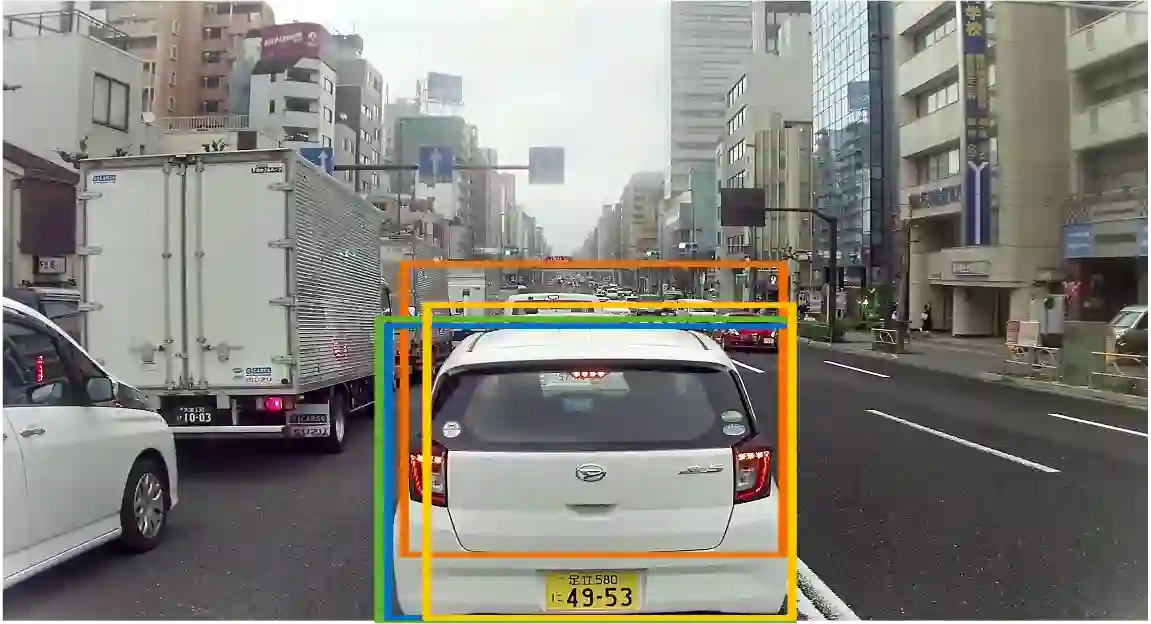
Recent multimodal large language models (MLLMs) have shown strong potential for autonomous driving scene understanding, yet existing methods still face a fundamental trade-off between temporal reasoning and spatial precision. Models that rely on single-frame or low-resolution inputs often miss small, distant, or partially occluded hazards, while language-centric driving models frequently provide limited grounded evidence for their explanations. To address this gap, we propose UniDrive, a unified visual-language and grounding framework for interpretable risk understanding in autonomous driving. UniDrive combines a temporal reasoning branch that models scene dynamics from multi-frame visual input with a high-resolution perception branch that preserves fine-grained spatial details from the latest frame. The two branches are integrated through a gated cross-attention fusion module, enabling dynamic context to be aligned with precise spatial evidence. Based on the fused representation, UniDrive jointly generates natural-language risk descriptions and grounded bounding-box outputs for risk objects. Experiments on the DRAMA-Reasoning benchmark show that UniDrive outperforms representative image-based and video-based baselines in both captioning and risk-object grounding. In particular, UniDrive achieves the best overall performance on the validation split and demonstrates clear advantages in small-object localization, zero-shot generalization to NuScenes and BDD100K, and human-rated interpretability and trustworthiness. These results suggest that explicitly combining temporal semantics and high-resolution perception provides a stronger foundation for interpretable and safety-oriented autonomous driving systems. The code is available at https://github.com/pixeli99/unidrive-dev.
翻译:暂无翻译