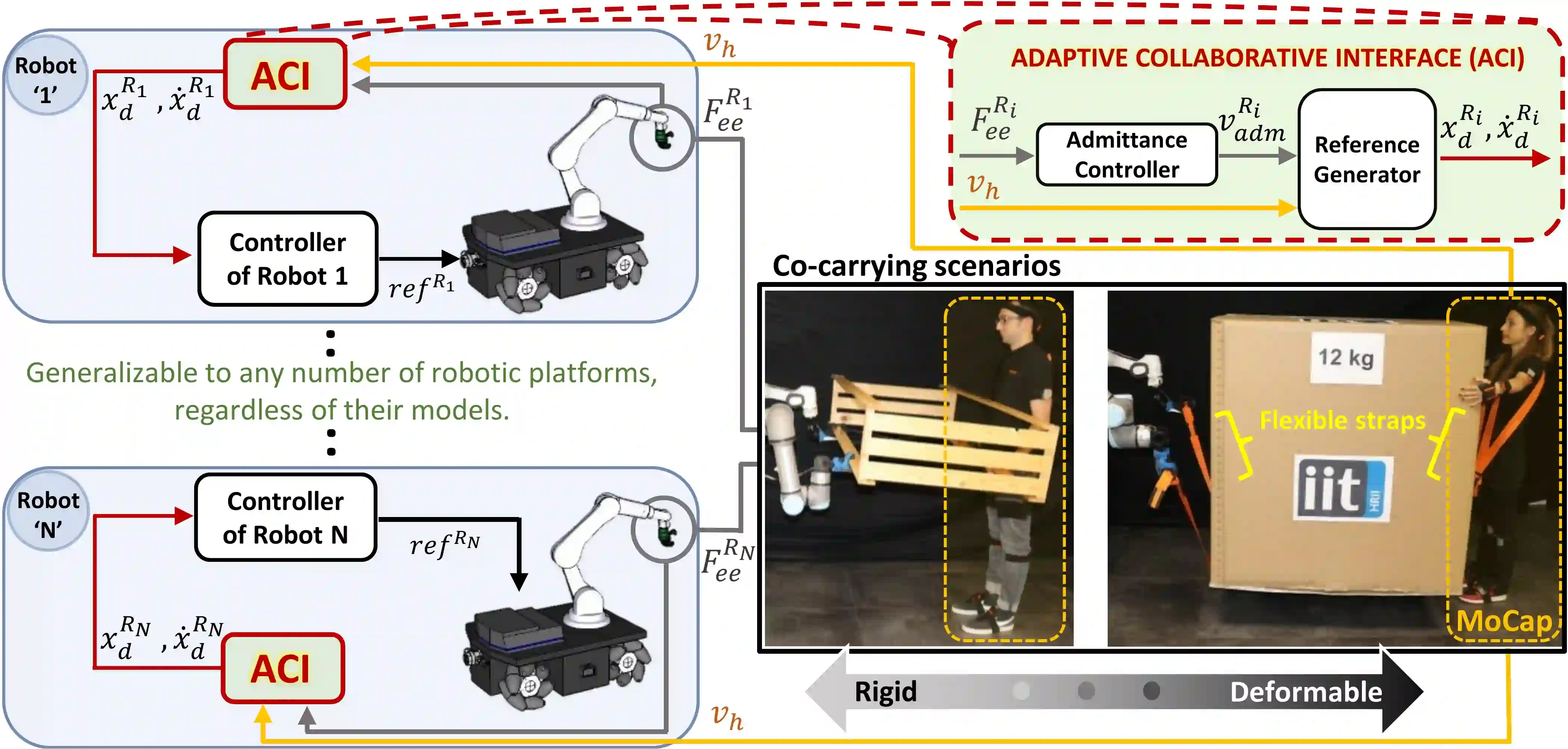
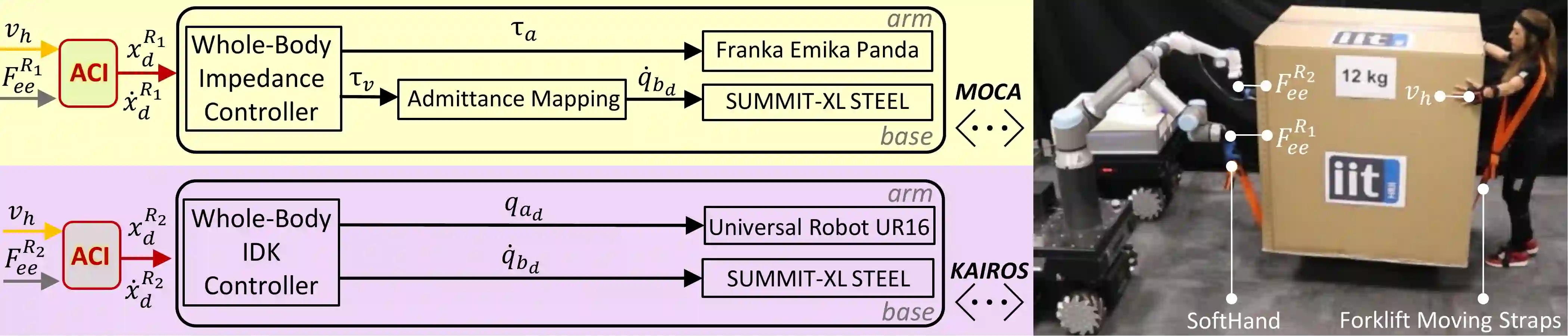
This manuscript introduces an object deformability-agnostic framework for co-carrying tasks that are shared between a person and multiple robots. Our approach allows the full control of the co-carrying trajectories by the person while sharing the load with multiple robots depending on the size and the weight of the object. This is achieved by merging the haptic information transferred through the object and the human motion information obtained from a motion capture system. One important advantage of the framework is that no strict internal communication is required between the robots, regardless of the object size and deformation characteristics. We validate the framework with two challenging real-world scenarios: co-transportation of a wooden rigid closet and a bulky box on top of forklift moving straps, with the latter characterizing deformable objects. In order to evaluate the generalizability of the proposed framework, a heterogenous team of two mobile manipulators that consist of an Omni-directional mobile base and a collaborative robotic arm with different DoFs is chosen for the experiments. The qualitative comparison between our controller and the baseline controller (i.e., an admittance controller) during these experiments demonstrated the effectiveness of the proposed framework especially when co-carrying deformable objects. Furthermore, we believe that the performance of our framework during the experiment with the lifting straps offers a promising solution for the co-transportation of bulky and ungraspable objects.
翻译:本文提出了一种与人机协作搬运任务相关的物体变形无关框架,该框架支持人与多台机器人共同搬运物体。该方法允许人完全控制搬运轨迹,同时根据物体的尺寸和重量,将负载分担给多台机器人。其实现方式融合了通过物体传递的触觉信息与从运动捕捉系统获取的人体运动信息。该框架的一个重要优势在于,无论物体尺寸和变形特性如何,机器人之间无需严格的内部通信。我们通过两个具有挑战性的现实场景验证了该框架:搬运木质刚性衣柜,以及使用叉车吊带搬运放置在顶部的笨重箱子——后者属于可变形物体。为评估框架的泛化能力,实验选用了由不同自由度全向移动底座与协作机械臂组成的异构双移动操作机器人团队。实验中将我们的控制器与基线控制器(即导纳控制器)进行定性比较,结果表明该框架在共同搬运可变形物体时尤其有效。此外,我们认为该框架在吊带实验中的表现为笨重且不可抓取物体的协同搬运提供了可行方案。