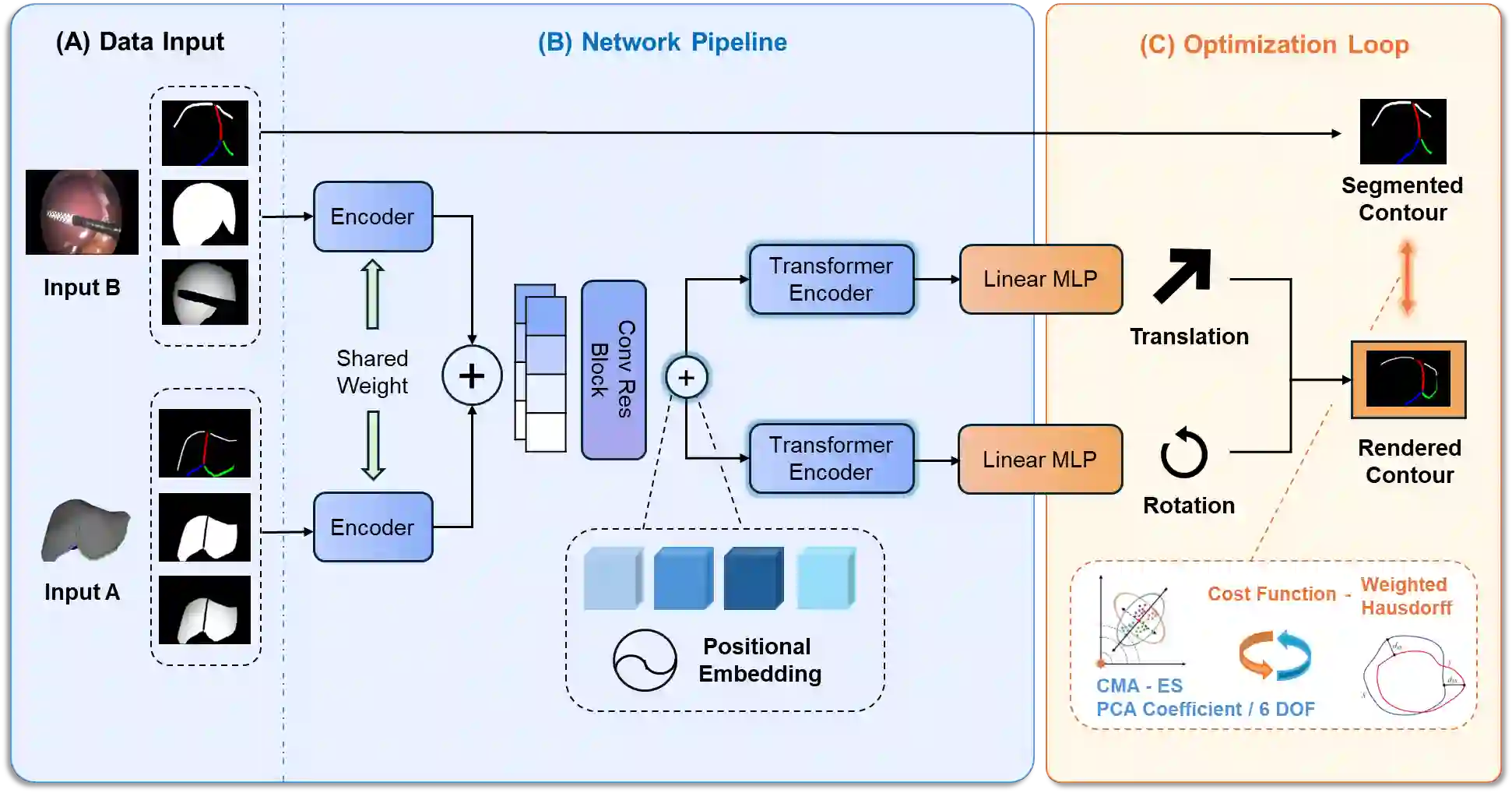
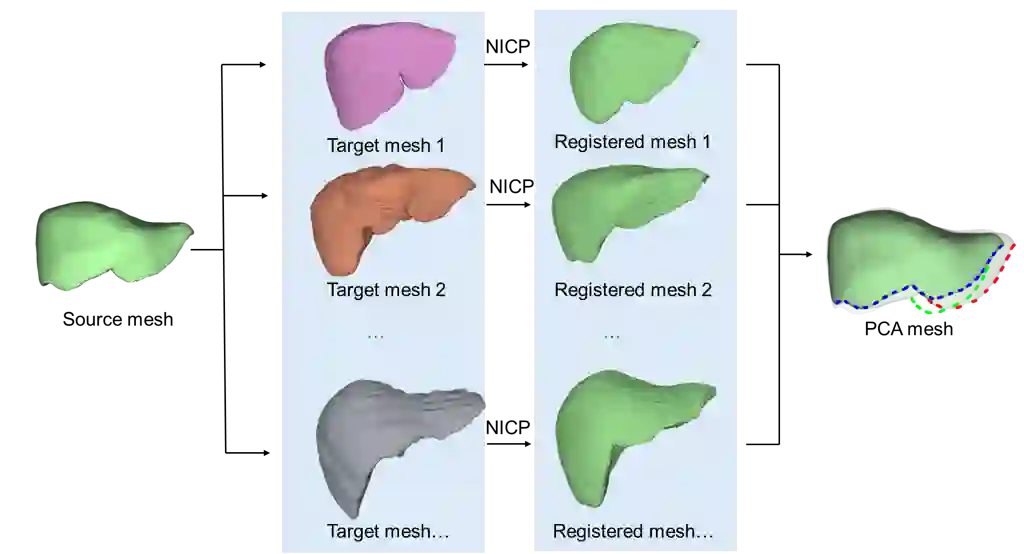
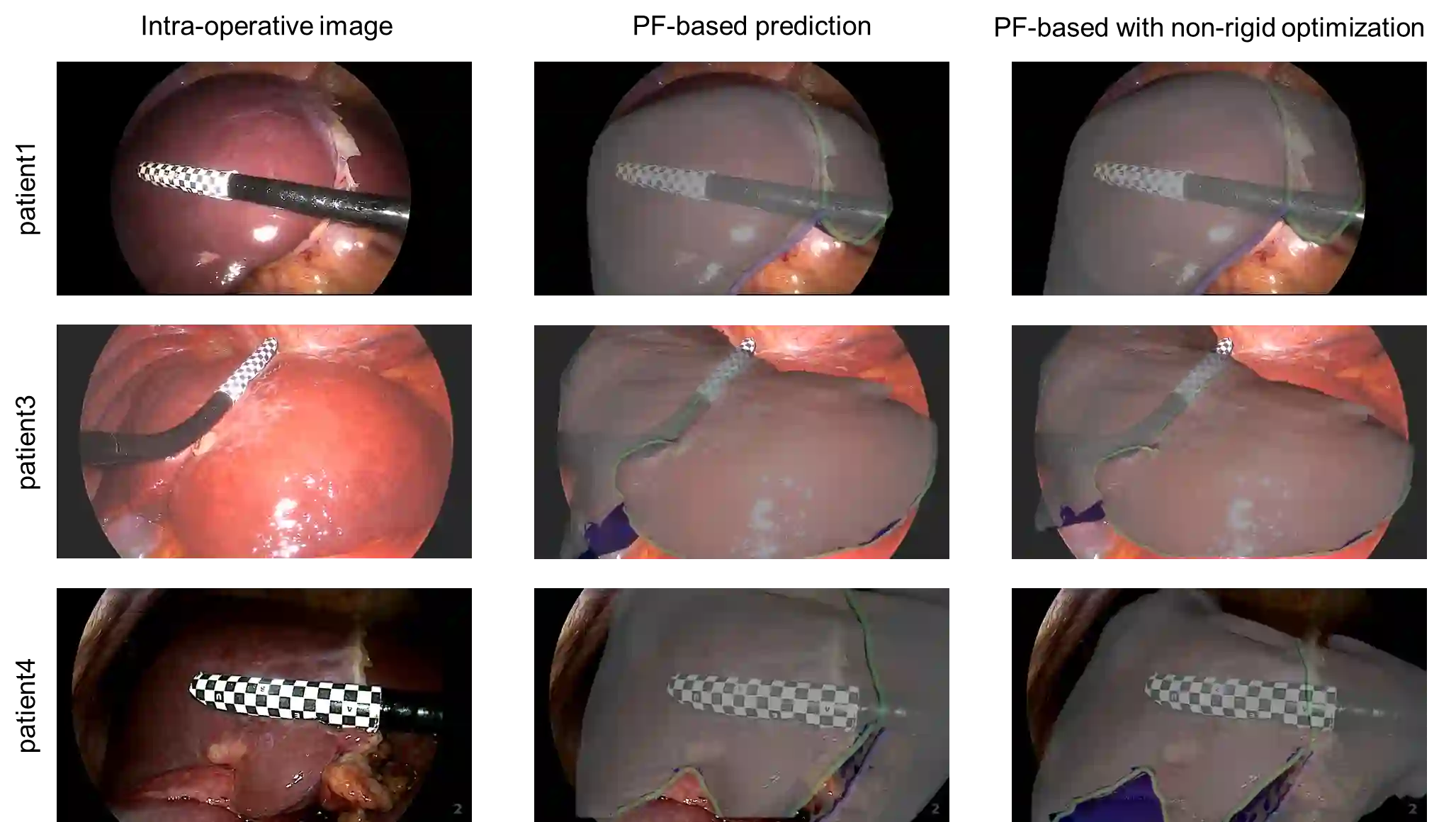
Augmented reality can improve tumor localization in laparoscopic liver surgery. Existing registration pipelines typically depend on organ contours; deformable (non-rigid) alignment is often handled with finite-element (FE) models coupled to dimensionality-reduction or machine-learning components. We integrate laparoscopic depth maps with a foundation pose estimator for camera-liver pose estimation and replace FE-based deformation with non-rigid iterative closest point (NICP) to lower engineering/modeling complexity and expertise requirements. On real patient data, the depth-augmented foundation pose approach achieved 9.91 mm mean registration error in 3 cases. Combined rigid-NICP registration outperformed rigid-only registration, demonstrating NICP as an efficient substitute for finite-element deformable models. This pipeline achieves clinically relevant accuracy while offering a lightweight, engineering-friendly alternative to FE-based deformation.
翻译:增强现实技术可提升腹腔镜肝脏手术中的肿瘤定位精度。现有配准流程通常依赖器官轮廓;可变形(非刚性)对齐常通过结合降维或机器学习组件的有限元模型实现。本研究将腹腔镜深度图与基础姿态估计器相结合,用于相机-肝脏姿态估计,并以非刚性迭代最近点算法替代基于有限元的形变模型,从而降低工程/建模复杂度及专业知识要求。在真实患者数据中,采用深度增强基础姿态方法在3例病例中实现了9.91毫米的平均配准误差。刚性-NICP联合配准优于纯刚性配准,证明NICP可作为有限元形变模型的高效替代方案。该流程在达到临床相关精度的同时,为基于有限元的形变方法提供了轻量化、工程友好的替代方案。