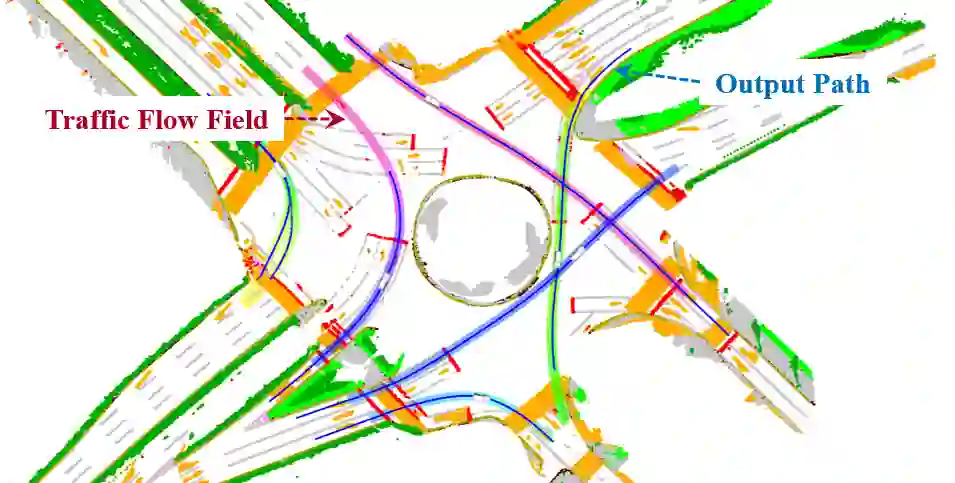
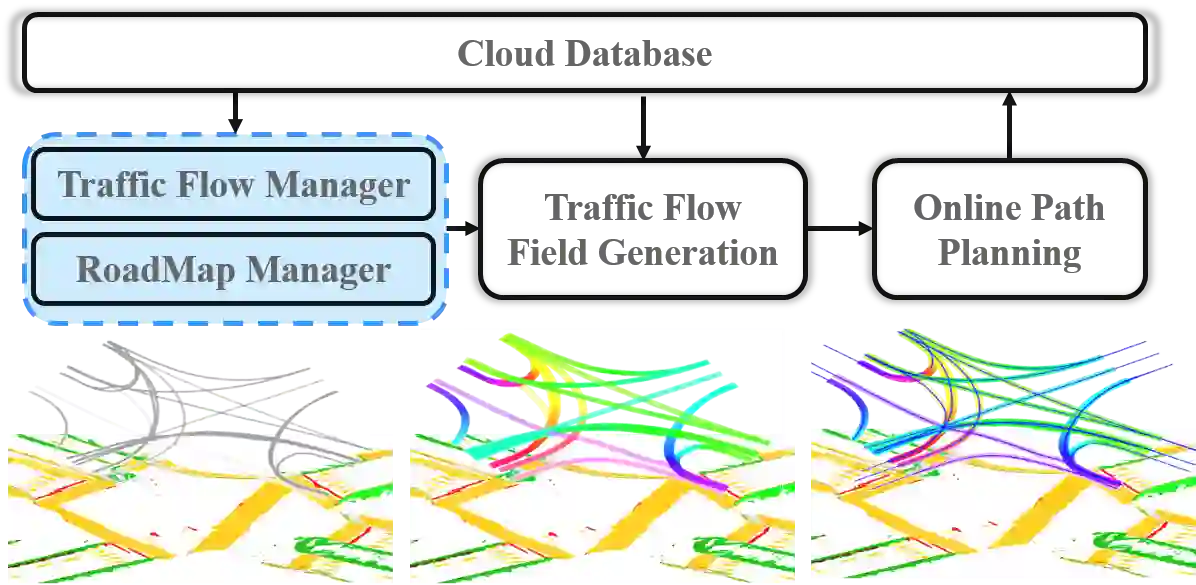
There is extensive literature on perceiving road structures by fusing various sensor inputs such as lidar point clouds and camera images using deep neural nets. Leveraging the latest advance of neural architects (such as transformers) and bird-eye-view (BEV) representation, the road cognition accuracy keeps improving. However, how to cognize the ``road'' for automated vehicles where there is no well-defined ``roads'' remains an open problem. For example, how to find paths inside intersections without HD maps is hard since there is neither an explicit definition for ``roads'' nor explicit features such as lane markings. The idea of this paper comes from a proverb: it becomes a way when people walk on it. Although there are no ``roads'' from sensor readings, there are ``roads'' from tracks of other vehicles. In this paper, we propose FlowMap, a path generation framework for automated vehicles based on traffic flows. FlowMap is built by extending our previous work RoadMap, a light-weight semantic map, with an additional traffic flow layer. A path generation algorithm on traffic flow fields (TFFs) is proposed to generate human-like paths. The proposed framework is validated using real-world driving data and is amenable to generating paths for super complicated intersections without using HD maps.
翻译:融合激光雷达点云与摄像头图像等传感器输入并利用深度神经网络感知道路结构已有大量文献报道。借助神经架构(如Transformer)与鸟瞰图(BEV)表征的最新进展,道路认知精度不断提升。然而,对于自动驾驶车辆而言,如何认知没有明确"道路"定义的场景仍是一个开放性问题。例如,在无高清地图的交叉路口内寻找路径十分困难,因为既不存在"道路"的明确定义,也不存在车道标线等显式特征。本文的灵感源自一句谚语:世上本无路,走的人多了便成了路。尽管传感器读数中不存在"道路",但其他车辆的行驶轨迹却形成了"道路"。为此,本文提出FlowMap——一种基于交通流的自动驾驶车辆路径生成框架。FlowMap通过在我们的前期工作RoadMap(一种轻量级语义地图)中扩展交通流层而构建。针对交通流场,我们提出路径生成算法以生成类人路径。基于真实驾驶数据的验证表明,该框架能够在无需高清地图的情况下为超复杂交叉路口生成路径。