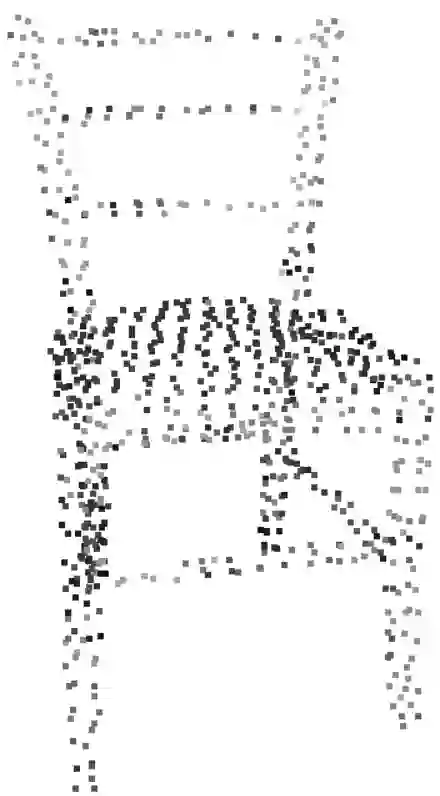
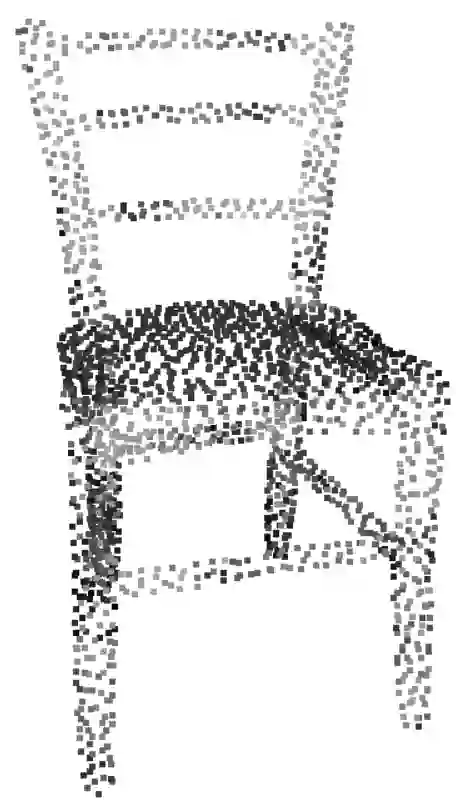
Affordable 3D scanners often produce sparse and non-uniform point clouds that negatively impact downstream applications in robotic systems. While existing point cloud upsampling architectures have demonstrated promising results on standard benchmarks, they tend to experience significant performance drops when the test data have different distributions from the training data. To address this issue, this paper proposes a test-time adaption approach to enhance model generality of point cloud upsampling. The proposed approach leverages meta-learning to explicitly learn network parameters for test-time adaption. Our method does not require any prior information about the test data. During meta-training, the model parameters are learned from a collection of instance-level tasks, each of which consists of a sparse-dense pair of point clouds from the training data. During meta-testing, the trained model is fine-tuned with a few gradient updates to produce a unique set of network parameters for each test instance. The updated model is then used for the final prediction. Our framework is generic and can be applied in a plug-and-play manner with existing backbone networks in point cloud upsampling. Extensive experiments demonstrate that our approach improves the performance of state-of-the-art models.
翻译:廉价3D扫描仪常产生稀疏且不均匀的点云,这会对机器人系统的下游应用产生负面影响。尽管现有点云上采样架构在标准基准测试中取得了显著成果,但当测试数据与训练数据分布不同时,其性能会显著下降。为解决此问题,本文提出了一种测试时自适应方法以增强点云上采样的模型泛化能力。该方法利用元学习显式学习用于测试时自适应的网络参数,且无需测试数据的任何先验信息。在元训练阶段,模型参数从一系列实例级任务中学习,每个任务包含一组来自训练数据的稀疏-密集点云对。在元测试阶段,通过少量梯度更新微调训练后的模型,为每个测试实例生成独特的网络参数集,并利用更新后的模型进行最终预测。本框架具有通用性,可即插即用地应用于现有点云上采样骨干网络。大量实验证明,该方法有效提升了现有最先进模型的性能。