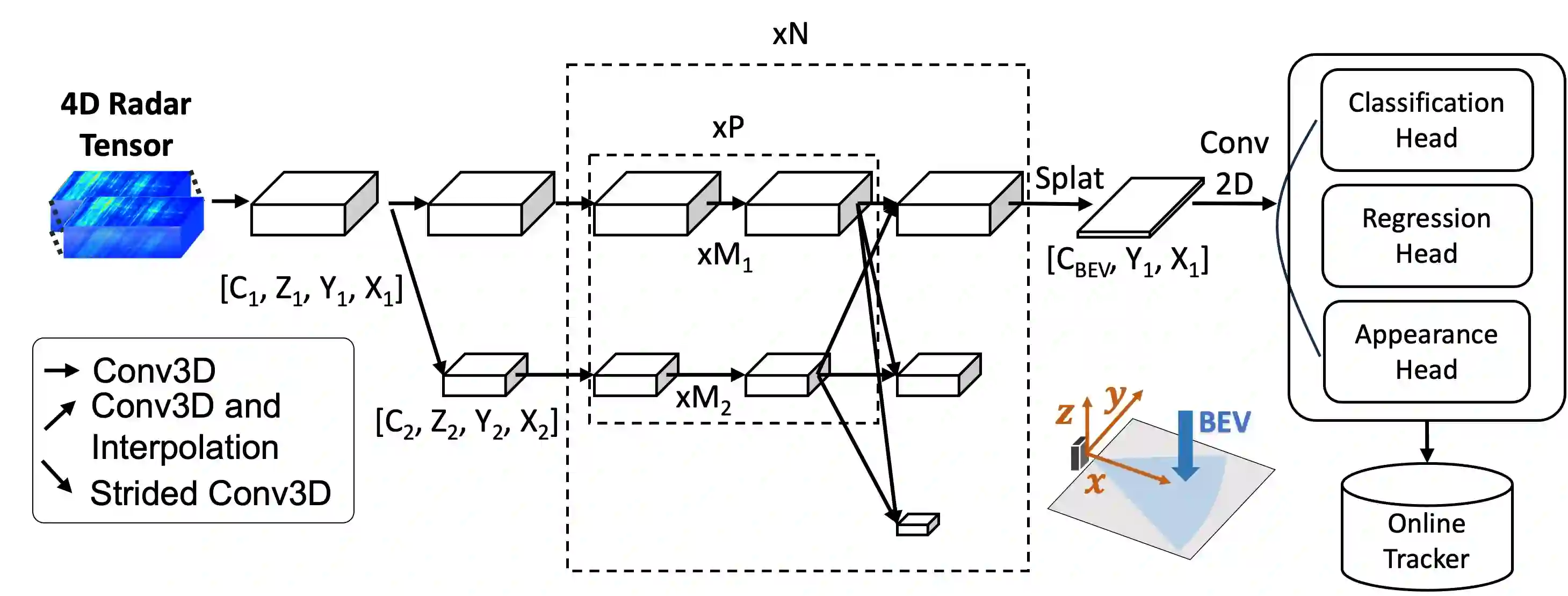
Robust perception is a vital component for ensuring safe autonomous and assisted driving. Automotive radar (77 to 81 GHz), which offers weather-resilient sensing, provides a complementary capability to the vision- or LiDAR-based autonomous driving systems. Raw radio-frequency (RF) radar tensors contain rich spatiotemporal semantics besides 3D location information. The majority of previous methods take in 3D (Doppler-range-azimuth) RF radar tensors, allowing prediction of an object's location, heading angle, and size in bird's-eye-view (BEV). However, they lack the ability to at the same time infer objects' size, orientation, and identity in the 3D space. To overcome this limitation, we propose an efficient joint architecture called CenterRadarNet, designed to facilitate high-resolution representation learning from 4D (Doppler-range-azimuth-elevation) radar data for 3D object detection and re-identification (re-ID) tasks. As a single-stage 3D object detector, CenterRadarNet directly infers the BEV object distribution confidence maps, corresponding 3D bounding box attributes, and appearance embedding for each pixel. Moreover, we build an online tracker utilizing the learned appearance embedding for re-ID. CenterRadarNet achieves the state-of-the-art result on the K-Radar 3D object detection benchmark. In addition, we present the first 3D object-tracking result using radar on the K-Radar dataset V2. In diverse driving scenarios, CenterRadarNet shows consistent, robust performance, emphasizing its wide applicability.
翻译:鲁棒感知是确保安全自主驾驶与辅助驾驶的关键组成部分。车载雷达(77至81 GHz)具备抗天气干扰的感知能力,为基于视觉或激光雷达的自动驾驶系统提供了互补性功能。除三维位置信息外,原始射频(RF)雷达张量还包含丰富的时空语义。以往大多数方法处理三维(多普勒-距离-方位角)RF雷达张量,可预测鸟瞰图(BEV)中目标的位置、航向角及尺寸,但无法同时推断三维空间中目标的尺寸、朝向与身份信息。为突破这一局限,我们提出一种名为CenterRadarNet的高效联合架构,旨在从四维(多普勒-距离-方位角-俯仰角)雷达数据中学习高分辨率表征,以支持三维目标检测与重识别(re-ID)任务。作为单阶段三维目标检测器,CenterRadarNet可直接推断BEV目标分布置信度图、对应的三维边界框属性以及每个像素的表观嵌入。此外,我们利用学习到的表观嵌入构建在线跟踪器以实现重识别。在K-Radar三维目标检测基准上,CenterRadarNet取得了当前最优结果。同时,我们在K-Radar数据集V2上首次展示了基于雷达的三维目标跟踪结果。在多种驾驶场景中,CenterRadarNet展现出稳定且鲁棒的性能,凸显其广泛适用性。