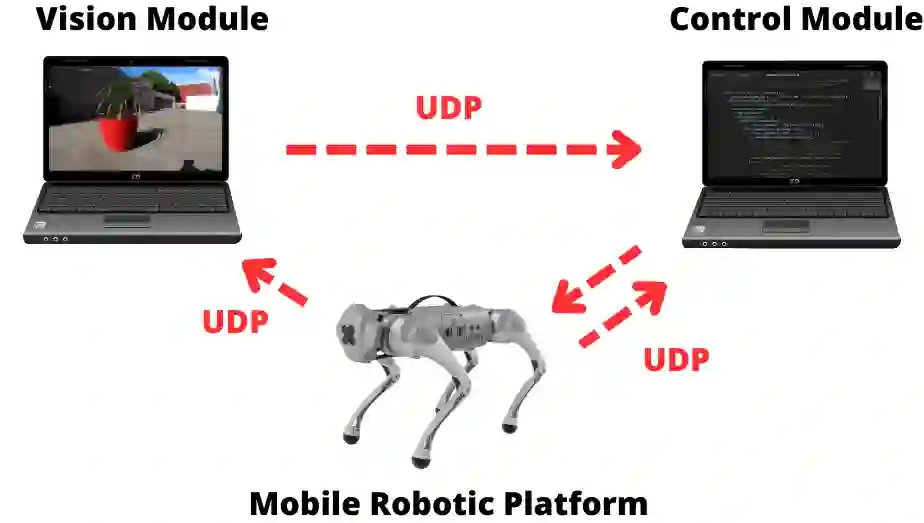
The 6G paradigm and the massive usage of interconnected wireless devices introduced the need for flexible wireless networks. A promising approach lies in employing Mobile Robotic Platforms (MRPs) to create communications cells on-demand. The challenge consists in positioning the MRPs to improve the wireless connectivity offered. This is exacerbated in millimeter wave (mmWave), Terahertz (THz), and visible light-based networks, which imply the establishment of short-range, Line of Sight (LoS) wireless links to take advantage of the ultra-high bandwidth channels available. This paper proposes a solution to enable the obstacle-aware, autonomous positioning of MRPs and provide LoS wireless connectivity to communications devices. It consists of 1) a Vision Module that uses video data gathered by the MRP to determine the location of obstacles, wireless devices and users, and 2) a Control Module, which autonomously positions the MRP based on the information provided by the Vision Module. The proposed solution was validated in simulation and through experimental testing, showing that it is able to position an MRP while ensuring LoS wireless links between a mobile communications cell and wireless devices or users.
翻译:6G范式及大规模互联无线设备的应用催生了对柔性无线网络的需求。一种有前景的方法是使用移动机器人平台(MRP)按需构建通信蜂窝。其核心挑战在于如何定位MRP以优化无线连接质量。这一问题在毫米波(mmWave)、太赫兹(THz)及可见光通信网络中尤为突出——这些网络需建立短距离视距(LoS)无线链路以利用超高带宽信道。本文提出一种解决方案,使MRP具备障碍物感知的自主定位能力,为通信设备提供LoS无线连接。该方案包含:1) 视觉模块——利用MRP采集的视频数据识别障碍物、无线设备及用户位置;2) 控制模块——根据视觉模块信息自主定位MRP。通过仿真与实验测试验证,本方案可在确保移动通信蜂窝与无线设备/用户间保持LoS链路的前提下,实现对MRP的有效定位。